32
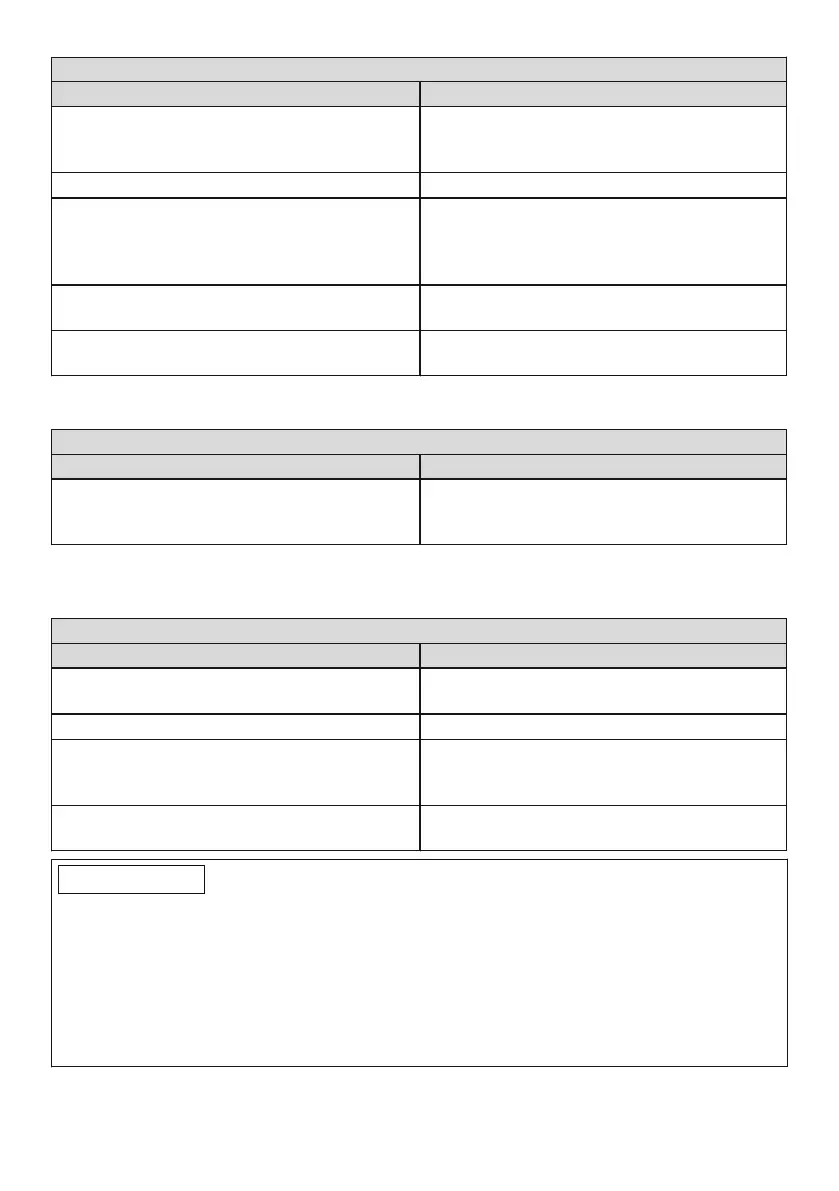
No extension in the stance phase
Cause Possible solution
The prosthetic alignment is not optimal. Check and optimise the sagittal prosthetic
alignment under load (see the chapter "Static
Alignment" see Page29).
The stride is too long. Increase swing phase damping.
Stance phase damping of the prosthetic knee
joint is too low.
Stance phase damping of the prosthetic knee
joint should be optimised for sitting down as
well as for alternating negotiation of stairs and
ramps.
Stance phase damping of the hip joint is too
high.
Reduce stance phase damping.
The chosen functional prosthesis components
are not optimal for the patient.
Check the selection and use different function
al prosthesis components if needed.
If the chosen prosthetic knee joint also does not switch to swing phase mode at the end of the
stance phase when used with the prosthetic hip joint, this can have the following causes:
No changeover to swing phase (3C98-2 C-Leg)
Cause Possible solution
The forefoot load value is not reached during
rollover.
Check the forefoot load with C-Soft while walk
ing and correct if required (C-Soft Instructions
for Use: 647G268).
If the prosthetic hip joint does not go into extension at heel strike, this can have several causes.
Check for the following possible causes and, if needed, make the specified adjustments to
achieve extension of the prosthetic hip joint at heel strike:
Hip joint: no extension at heel strike
Cause Possible solution
Stance phase damping of the prosthetic hip
joint is too high.
Reduce stance phase damping.
The stride is too long. Increase swing phase damping.
The prosthetic alignment is not optimal. Check and optimise the sagittal prosthetic
alignment under load (see the chapter "Bench
Alignment" see Page28).
The chosen functional prosthesis components
are not optimal for the patient.
Check the selection and use different function
al prosthesis components if needed.
INFORMATION
When adjusting stance phase damping, change the settings gradually and keep checking
whether damping can be further increased. It is important for the prosthesis wearer that weight
can be put on the prosthesis side as long as possible during the stance phase.
The stance phase movement on the moving prosthetic hip joint is possible because of high
damping and should be considered the goal of trial walking, even if the prosthesis wearer might
feel uncomfortable at first! It takes time to understand this important procedure and to explain
and practise it with the prosthesis wearer. Only then will the prosthesis wearer be able to fully
benefit from the advantages of this product.
 Loading...
Loading...










