(1) Virtual mode
Y
ou can set real axes or virtual axes.
Use of real axes: Real axes are used to actually control the servo amplifier.
Use of virtual axes: Virtual axes create and execute a virtual servo amplifier within the GM1
Controller.
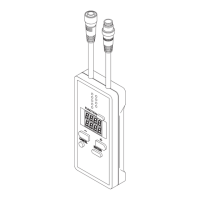
(2) Modulo / Finite
The axis type can be specified.
● Modulo
Modulo: The motor rotates infinitely (belt drive, etc.) without limiting the travel range.
• The value of the commanded position keeps looping between 0 and modulo value.
• The maximum settable modulo value is "255×units in application" (*1).
*1: For "units in application", specify settings in the "Scaling / Mapping" tab.
• A negative value cannot be set. (A warning is issued. If a download is performed without
correcting the value, an error will occur when the GM1 Controller is started.
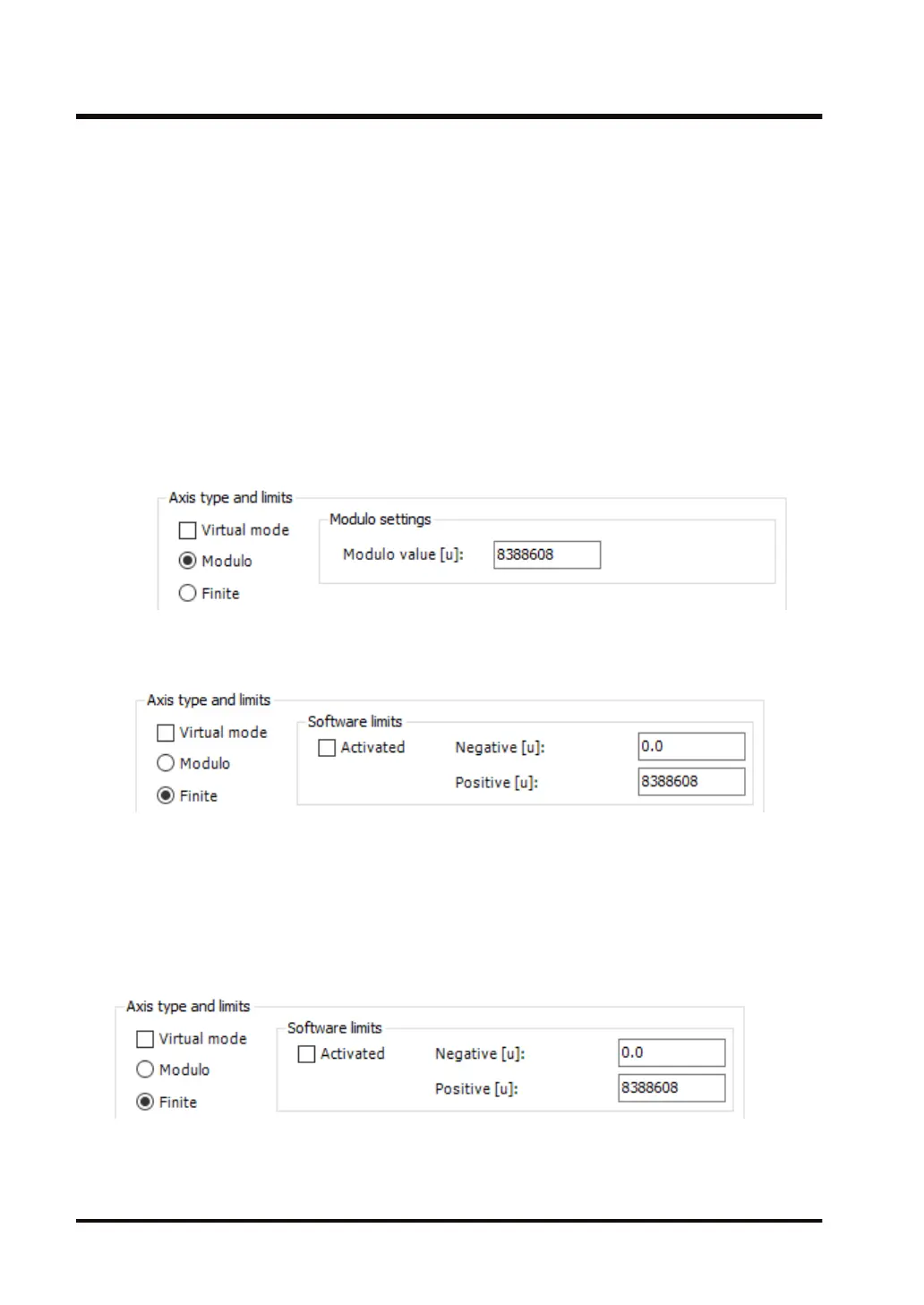
● Finite
The set value of the commanded position is a finite value.
Soft limits can be set. Note that an error will occur if a 32-bit real number is exceeded.
(3) Soft limits
If the axis type is set to "Finite", soft limits can be set.
If the commanded position falls outside the soft limit setting range, an error stop will occur
,
causing the operation to stop.
If the operation is stopped because the soft limit setting range is exceeded, the value specified
in "Deceleration” or “Max. distance" in "Soft error reaction" or the value specified in
"Deceleration” in "Dynamic limits" will be applied, whichever is the shortest time from when
deceleration starts until a stoppage occurs.
(4) Software error reaction
Settings can be configured to stop operation when an error occurs.
10.6 Basic Settings for EtherCAT Axes
10-16 WUME-GM1ETCSU-01

 Loading...
Loading...