3-8 EB 8331-4 EN
Design and principle of operation
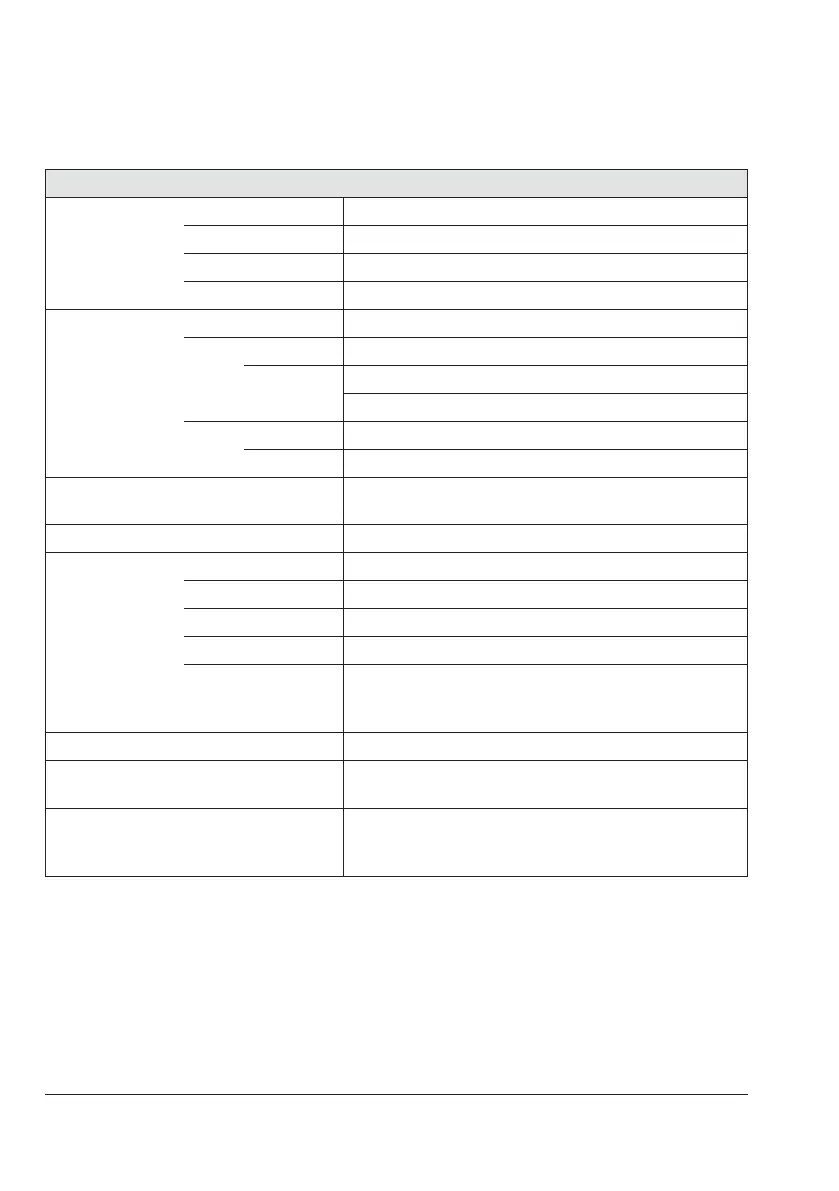
Table 3-3: Common data
Digital positioner
Input signal
Current input
0/4to20mA,adjustable·R
i
=50Ω
Voltage input
0/2to10V,adjustable·R
i
=20kΩ
Pt 1000 input
1)
Measuringrange:–50to150°C,300µA
Binaryinput
2)
Byjumperingtheterminals,notgalvanicallyisolated
Position feedback
Current 0/4to20mA,adjustable·Errormessage24mA
Resolution 1000stepsor0.02mA
Load Max.200Ω
Voltage 0/2to10V,adjustable·Errormessage12V
Resolution 1000stepsor0.01V
Load Min.5kΩ
Binaryinput Open-circuitvoltage:10V;short-circuitcurrent:5mA
Byjumperingtheterminals,notgalvanicallyisolated
Binaryoutput
Floating,max.230VAC/1A
Applications Positioner The travel follows the input signal
PID controller Fixed set point control
Two-step mode Two-stepmode,oatingbinaryinputforactuation
Three-step mode Three-stepmode,oatingbinaryinputforactuation
Temperature closed-
loop control upon
input signal failure
TheintegratedPIDcontrollerusesaxedsetpointfor
closed-loop control when the input signal is missing.
Display Iconsforfunctions,codesandtexteldwithbacklight
Rotary pushbutton Operating control for on-site operation to select and con-
rmcodesandvalues
Interface Standard RS-232·Forpoint-to-pointconnectiontocommunication
participantsorformemorypen·Permanentlyinstalled·
Connection: RJ-12 connector socket
1)
For PID Controller (PID) and Temperature closed-loop control upon input signal failure (POSF) appli-
cations only
2)
For two-step mode (2STP) and three-step mode (3STP) applications