Manual – IPOSplus®
81
6
Modulo function
Position Detection and Positioning
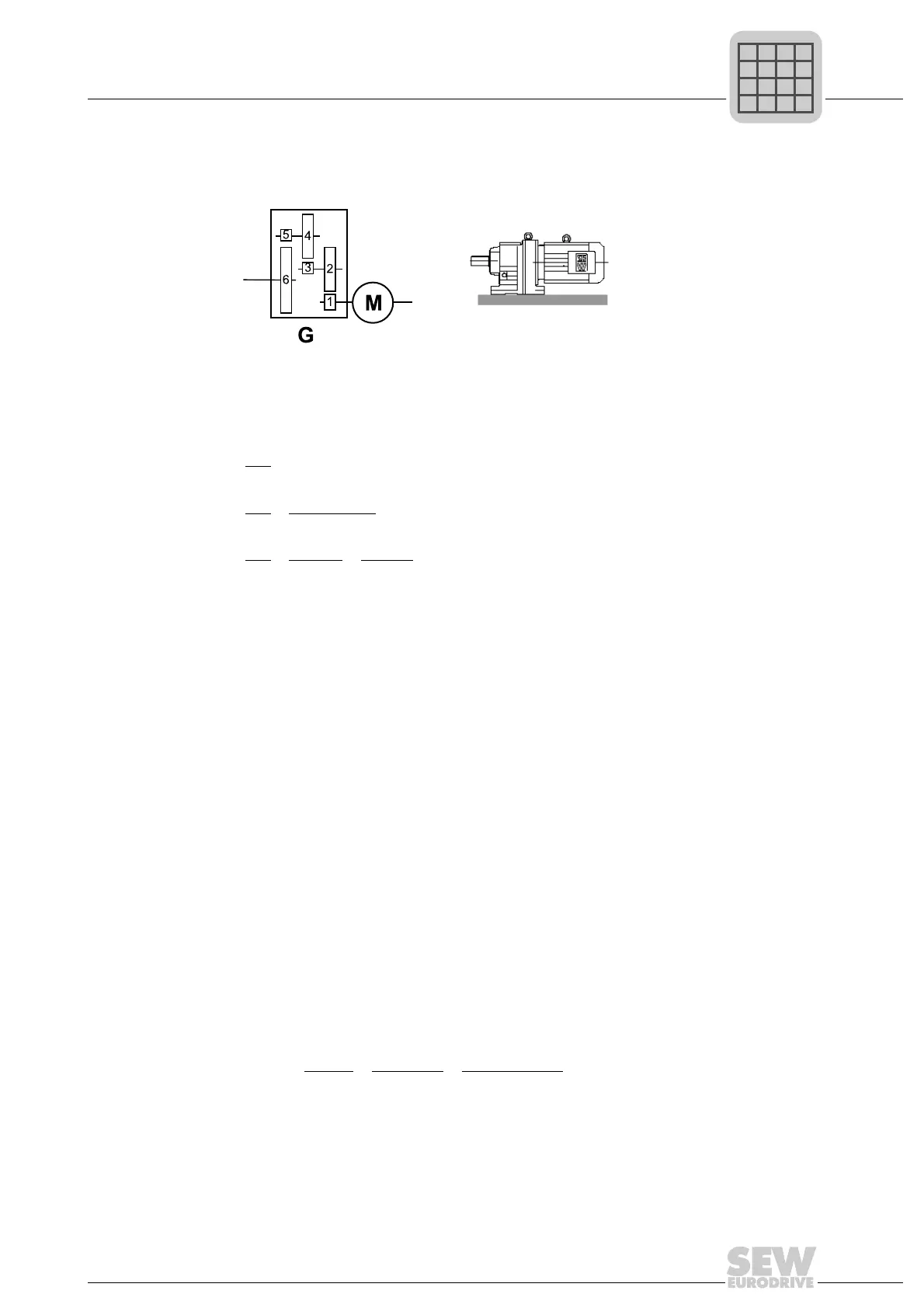
In this example, the following numbers of teeth were ascertained:
Z1 = 17 / Z2 = 74 / Z3 = 8 / Z4 = 33 / Z5 = 16 / Z6 = 93
The following calculations must be performed to determine the SHELL parameters
modulo numerator, modulo denominator and modulo encoder resolution:
The numerator and denominator were reduced in the above example (happens auto-
matically with the Wingear program).
This results in the following input values for the SHELL parameters:
• Modulo numerator = 113553
• Modulo denominator = 1088
• Modulo encoder resolution = 4096
Step 3: Modulo range of representation and maximum target position
Check the modulo range of representation:
The product of the modulo encoder resolution and modulo numerator must be < 2
31
(decimal 2147483648).
Modulo numerator x modulo encoder resolution = 113553 × 4096 = 465113088
=> The condition has been met, the target position can be represented.
Check the maximum target position:
The maximum target position corresponds to 4.6 output revolutions.
477251979
M
N
= Modulo numerator
M
D
= Modulo denominator
i
G
= i gear unit
i
AG
= i additional gear
TP
max
= maximum target position
M = Modulo
M
N
= Modulo numerator
M
ER
= Modulo encoder resolution
M
M
ii
M
M
ZZZ
ZZ Z
M
M
N
D
GAG
N
D
N
D
=×
=
++
++
==
246
13 5
227106
2176
113553
1088
TP
MMM
NER
max
.=
°
=
×
=
×
=
2
360
22
113553 4096
46
31 31 31
 Loading...
Loading...