6
12.98 Frames
6.1 Coordinate transformation via frame variables
6
840D
NCU 571
840D
NCU 572
NCU 573
FM-NC 810D 840Di
Siemens AG 2000. All rights reserved
SINUMERIK 840D/840Di/810D/FM-NC Programming Guide Advanced (PGA)
−
04.00 Edition
6-193
Frame variable/frame relationship
A coordinate transformation can be activated by
assigning the value of a frame to a frame variable.
Example:
$P_PFRAME=CTRANS(X,10)
Frame variable:
$P_PFRAME
means: current programmable frame.
Frame:
CTRANS(X,10)
means: programmable zero offset
of X axis by 10 mm.
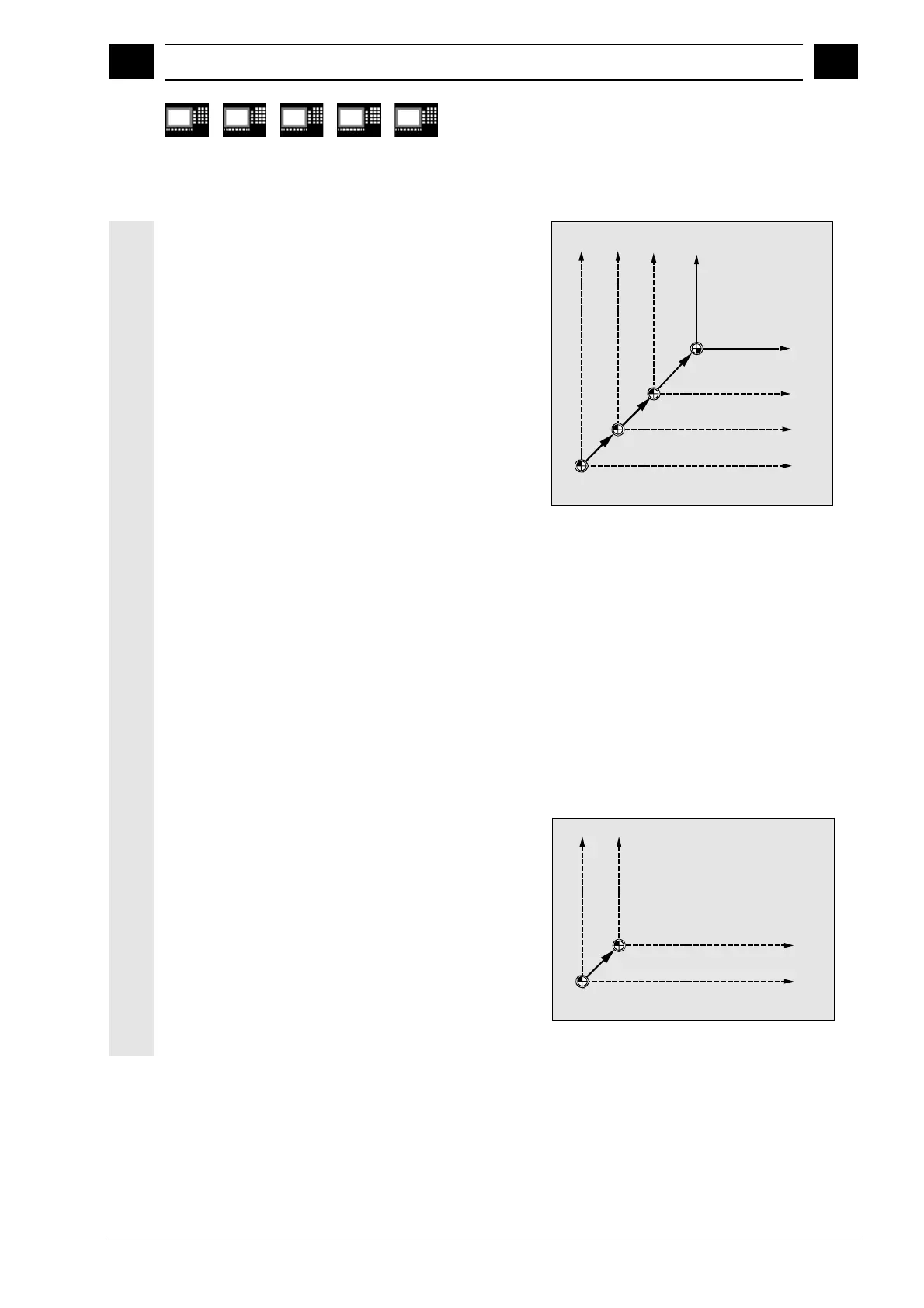
Y
BCS
X
BCS
Y
BOS
X
BOS
Y
SZS
X
SZS
Y
WCS
X
WCS
$P_BFRAME, $P_UBFR
$P_IFRAME, $P_UIFR[..]
$P_PFRAME
Reading out actual values
The current actual values of the coordinate system
can be read out via predefined variables in the part
program:
$AA_IM[axis] Read actual value in MCS
$AA_IB[axis] Read actual value in BCS
$AA_IBN[axis] Read actual value in BOS
$AA_IEN[axis] Read actual value in SZS
$AA_IW[axis] Read actual value in WCS
Overview of predefined Frame variables
$P_BFRAME
Current base frame variable that establishes the
reference between the basic coordinate system
(BCS) and the basic origin system (BOS).
For the base frame described via $P_UBFR to be
immediately active in the program, either
•
you have to program a G500, G54...G599, or
•
you have to describe $P_BFRAME with
$P_UBFR.
Z
BCS
X
BCS
Z
BOS
X
BOS
$P_BFRAME, $P_UBFR

 Loading...
Loading...



















