6
Frames 12.98
6.1 Coordinate transformation via frame variables
6
840D
NCU 571
840D
NCU 572
NCU 573
FM-NC 810D 840Di
Siemens AG 2000. All rights reserved
6-194
SINUMERIK 840D/840Di/810D/FM-NC Programming Guide Advanced (PGA)
−
04.00 Edition
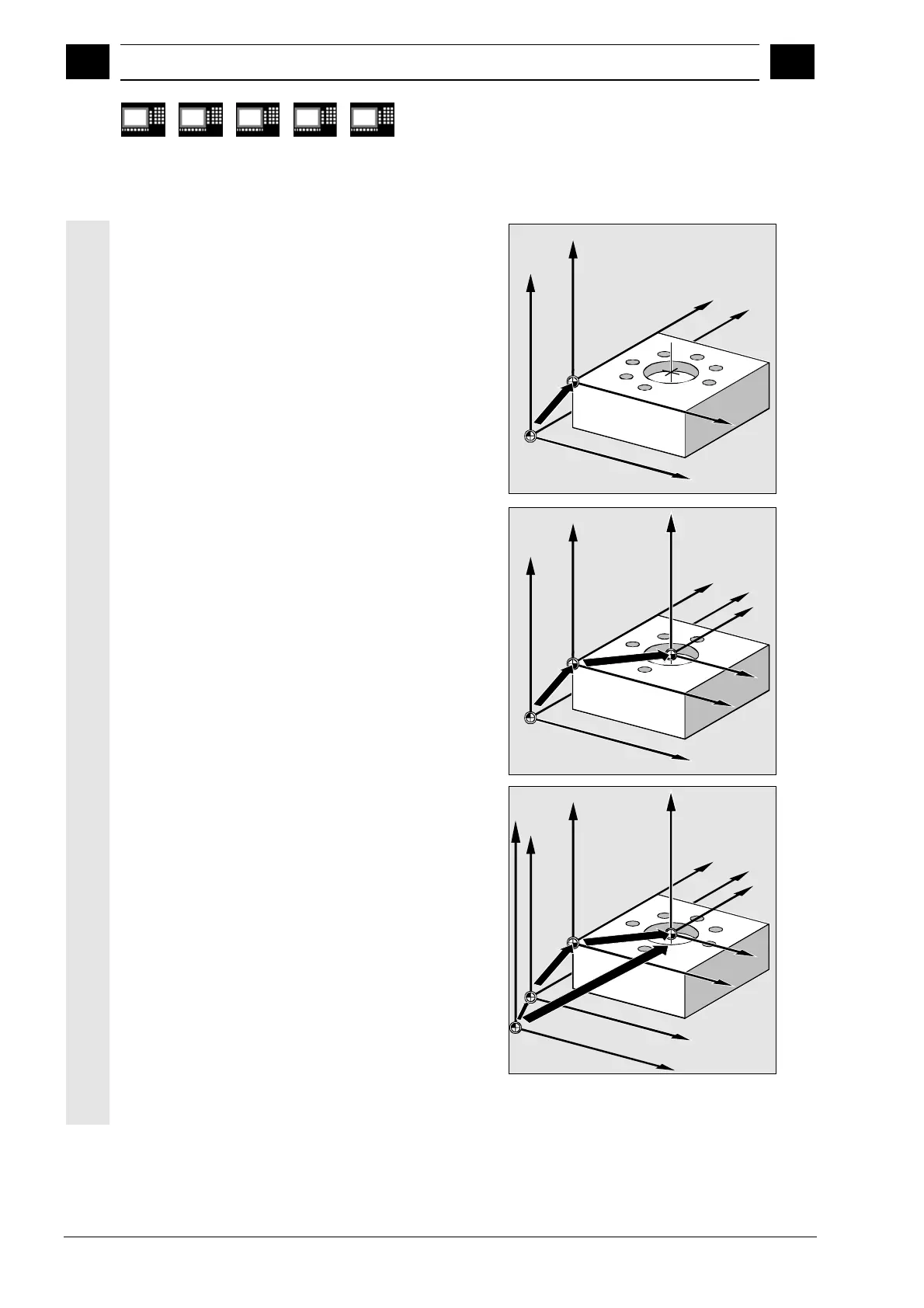
$P_IFRAME
Current, settable frame variable that establishes the
reference between the basic origin system (BOS)
and the settable zero system (SZS).
$P_IFRAME
corresponds to
$P_UIFR[$P_IFRNUM]
After G54 is programmed, for example,
$P_IFRAME
contains the translation, rotation, scaling and
mirroring defined by G54.
Z
BOS
Y
BOS
X
BOS
SZS
SZS
SZS
Z
X
Y
$P_PFRAME
Current, programmable frame variable that
establishes the reference between the settable zero
system (SZS) and the workpiece coordinate system
(WCS).
$P_PFRAME
contains the frame resulting from the
programming of TRANS/ATRANS, ROT/AROT,
SCALE/ASCALE, MIRROR/AMIRROR or the
assignment of CTRANS, CROT, CMIRROR,
CSCALE to the programmable FRAME.
Z
BOS
Y
X
BOS
Z
X
Z
SZS
SZS
WCS
WCS
WCS
X
SZS
BOS
Y
Y
$P_ACTFRAME
Current total frame resulting from chaining of the
current base frame variable
$P_BFRAME
, the current
settable frame variable
$P_IFRAME
and the current
programmable frame variable
$P_PFRAME
.
$P_ACTFRAME
describes the currently valid
workpiece zero.
If
$P_IFRAME, $P_BFRAME
or
$P_PFRAME
are
changed,
$P_ACTFRAME
is recalculated.
$P_ACTFRAME
corresponds to
$P_BFRAME:$P_IFRAME:$P_PFRAME
Z
BNS
Y
X
BNS
Z
Z
Y
X
Y
X
ENS
ENS
WKS
WKS
ENS
BNS
WKS
X
BKS
Z
BKS

 Loading...
Loading...



















