Simrad AP25 Autopilot
78 20222139A
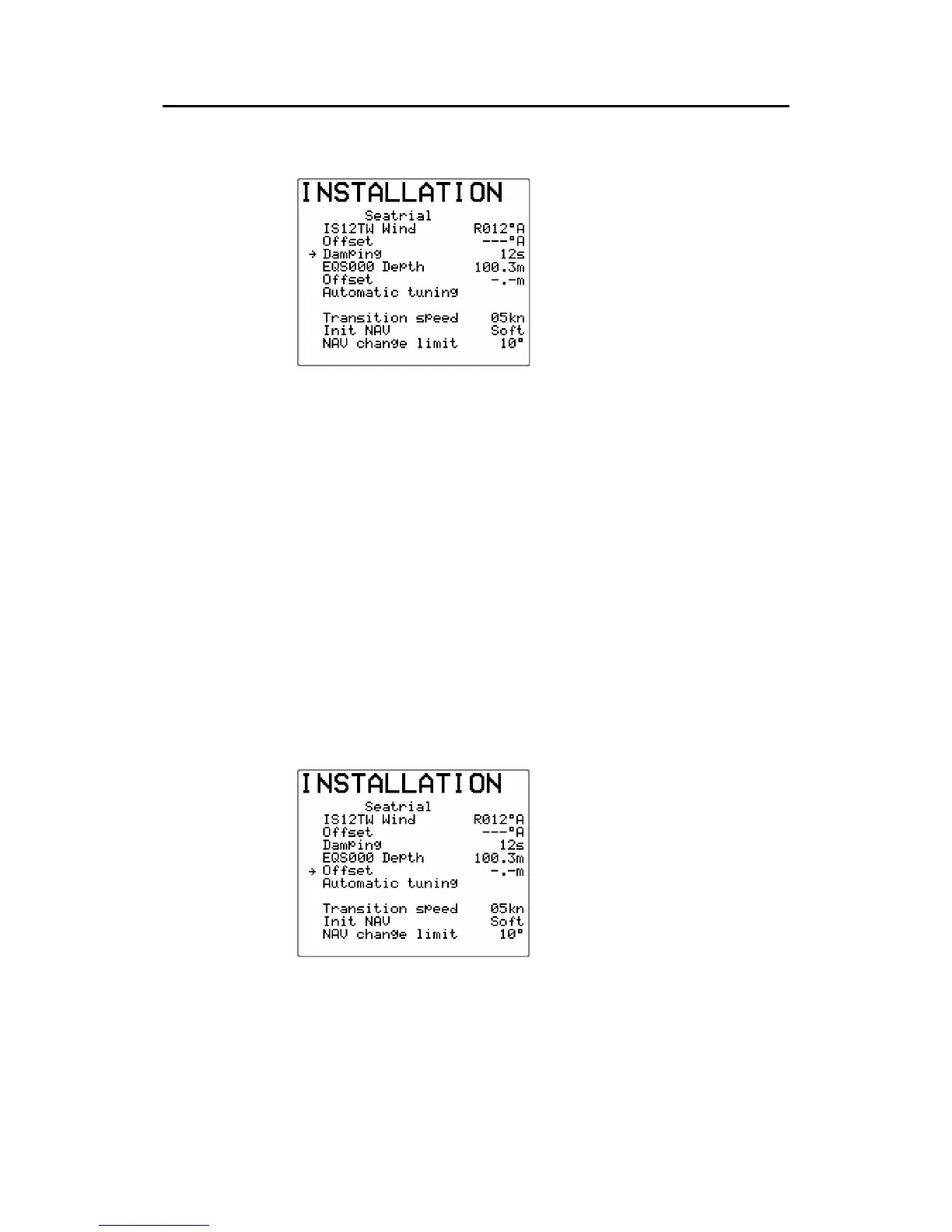
Wind damping
Damping of the apparent wind
angle is made by the Advanced
Wind Filter (AWF) in the
Autopilot Computer. The
inputs to the AWF are heading,
boat speed, apparent wind
angle and wind speed. Verify
that these inputs are available
in User Setup2/Source Select.
The boat speed input to the AWF is Speed Over Ground (SOG)
or speed through water. If none of these are available, the AWF
will use a boat speed that is 1.5 times the Transition Speed set in
the Installation/Seatrial menu. Turn the course knob to adjust the
wind damping.
Range: 1 – 100 seconds
Default: 15 seconds
Recommended setting for power boats: 1-5 seconds.
Depth Offset
Note ! This adjustment only applies to “smart” depth transducers that
outputs depth on NMEA2000 format. NMEA0183 sentence
‘DPT’ contains offset and the depth reading is from the surface.
NMEA0183 sentence ‘DBT’ contains no depth offset and the
reading will be from the position of the transducer.
When the depth offset is set to
zero, the indicated depth is
from the transducer to the
bottom. To read the depth from
the water surface to the bottom
you have to set the depth offset
according to the vertical
distance between the surface
and the transducer, i.e. positive
(+) value
To read the depth from the keel to the bottom you have to set the
depth offset according to the vertical distance between the
transducer and the keel, i.e. negative (–) value.