Simrad AP25 Autopilot
42 20222139A
AUTO Mode
Settings that are added for the AUTO mode are shown below.
Other relevant settings are described under STANDBY mode in
this chapter.
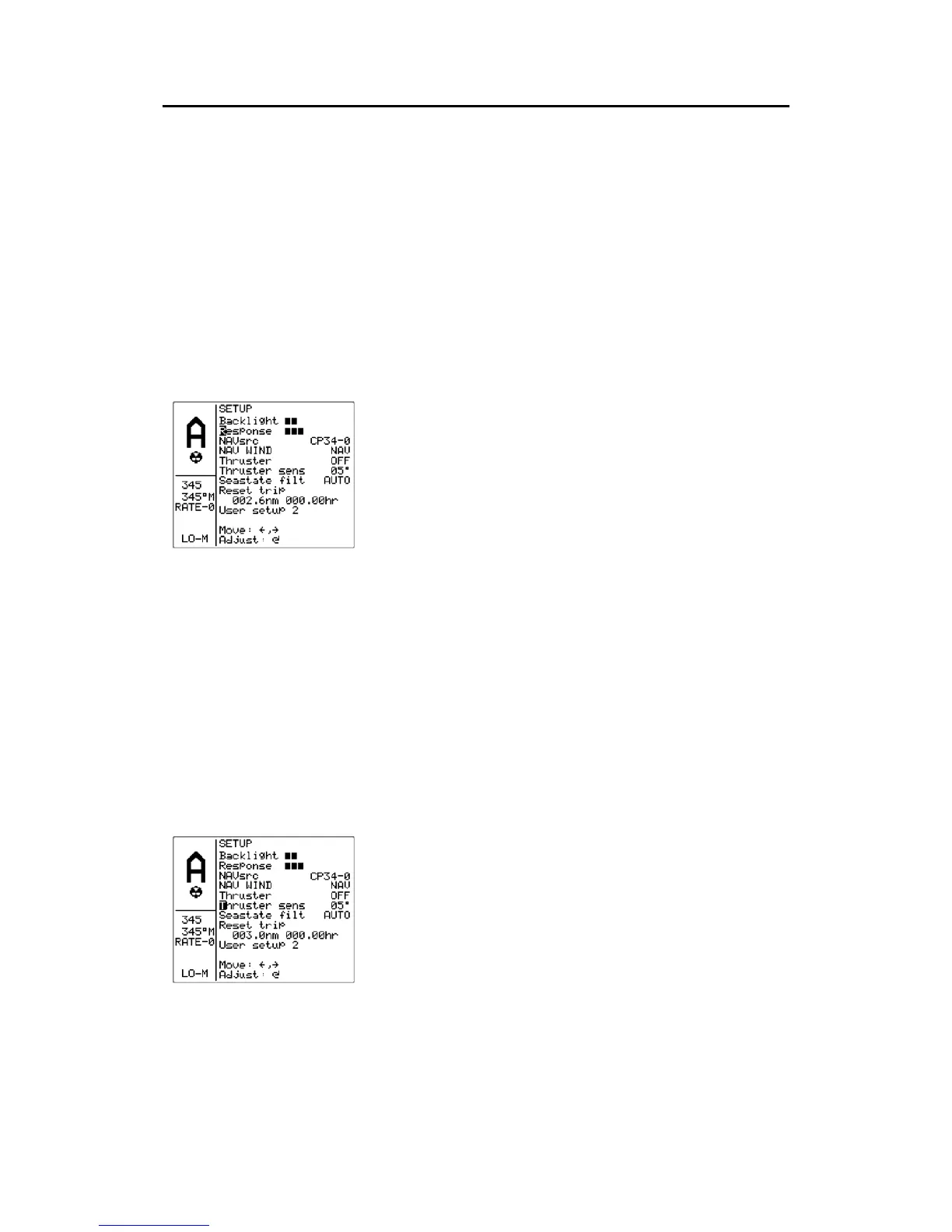
Response
The Autotune function in the AP25 is so refined that 80-85 % of
the boats will need no further adjustments of the steering
parameters. On some boats, however, or at particular sea
conditions a fine tuning of the steering parameters may improve
the performance of the autopilot.
The Response control allows you to make this fine
tuning. It can be set to seven levels. Level 3 (default)
has the values of Rudder and Counter Rudder
parameters set by the Autotune function. If no
Autotune is made (not recommended) the level 3
values are the factory default values.
A low response level reduces the rudder activity and provides a
more “loose” steering.
A high response level increases the rudder activity and provides
a more “tight” steering.
A too high response level will make the boat start S-ing.
Range: 1 – 7
Default: 3
NAV WIND setting, see page 38.
Thruster sens
(only available if a thruster is connected).
The Thruster sensitivity determines how many
degrees the vessel will deviate from the set course
before a thruster command is given. As the vessel
deviates from its heading, the thruster will push the
vessel back on. A higher value will reduce the
thruster activity.
If the thruster commands are hunting from side to side, the set
value for Thruster sens may be too low.
Range: 3° to 30° in 1° increments.
Default: 5°.