SOLO BETA User Manual
Error Reporting and Handling:
There is a 32 bits Error register on SOLO readable with command code of “0xA1”, which will
contain all the errors that possibly occurred during the operation, the user can read those errors,
find out their reason as well as over-writing them and forcing SOLO to continue as long as the
error(s) doesn’t happen again.
So in simple words, if an error occurs the following will happen:
1. SOLO will stop the Motor and keeps reporting the error(s) continuously with almost every
300ms through USB or UART to the users.
2. Now the user can decide to stop and find out the cause of the error or they can ask SOLO
to ignore the error by overwriting them.
3. If the user overwrites errors by sending 0 (0x00000000 in HEX) with command code of
“0x20” the errors will temporarily be ignored by SOLO, but if they occur again SOLO will
go back to the 1st step mentioned above.
The whole error handling process can be managed by the user in a couple of milliseconds, as the
data-line bandwidth is very wide (around 1M bits/s).
The purpose of error overwriting is to allow the user to see the problems transparently and decide
what to do, but SOLO will always keep track of catastrophic errors and it will not ignore them.
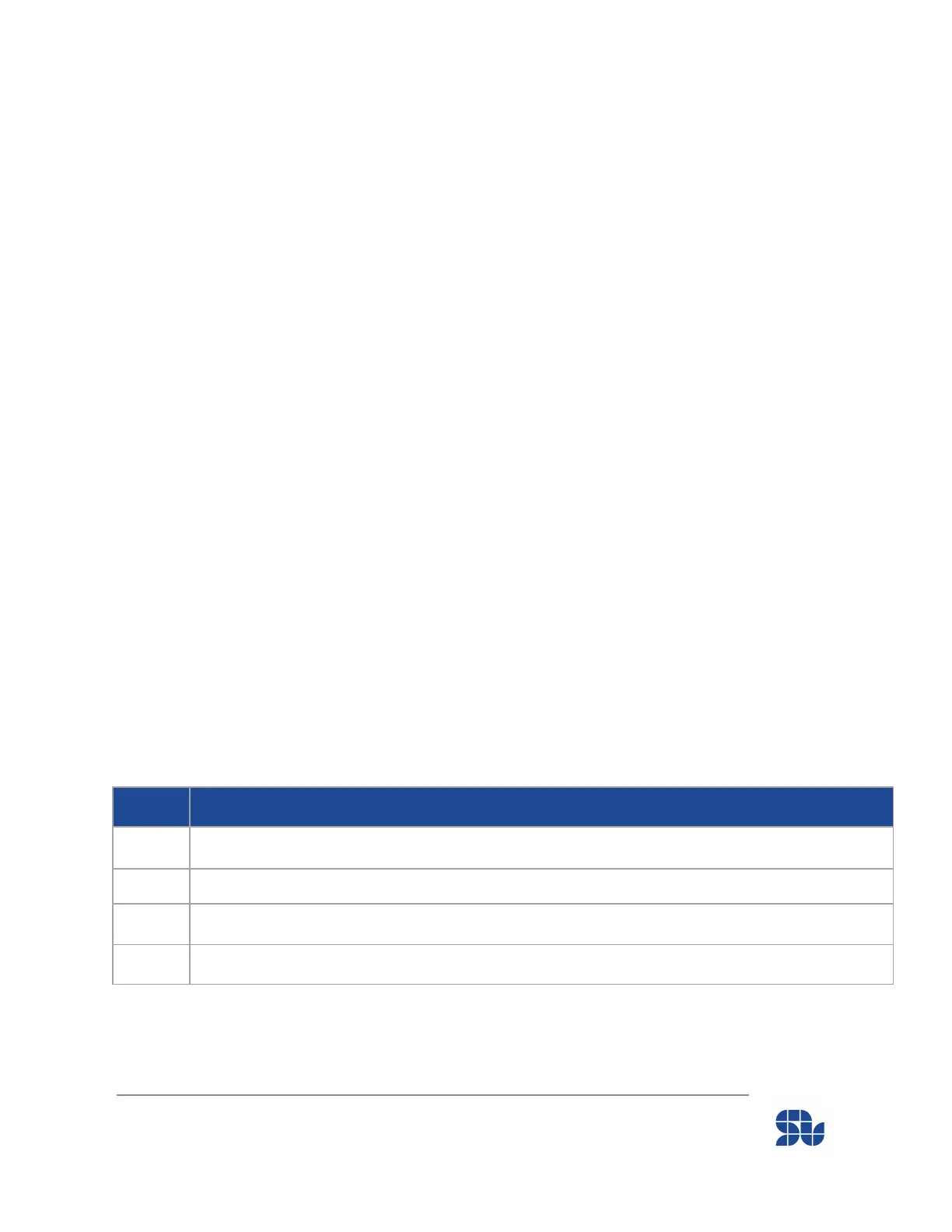
The following table is the bit arrangement of the error register, if any of the mentioned errors
occurs, you will receive “1” in the position of the 32bits corresponding to the error, so if the value
of the error register is anything other than Zero, it means there is a problem somewhere, which
you can find it out exactly by checking the following bits.
Error Register Table:
www.solomotorcontrollers.com
January 2021 - Revision V_1.0.5 Copyright © 2020, All right Reversed. SOLO motor controllers.
49