STE 80720
– 10-15 –
OPERATOR’S MANUAL
series Robot Controller
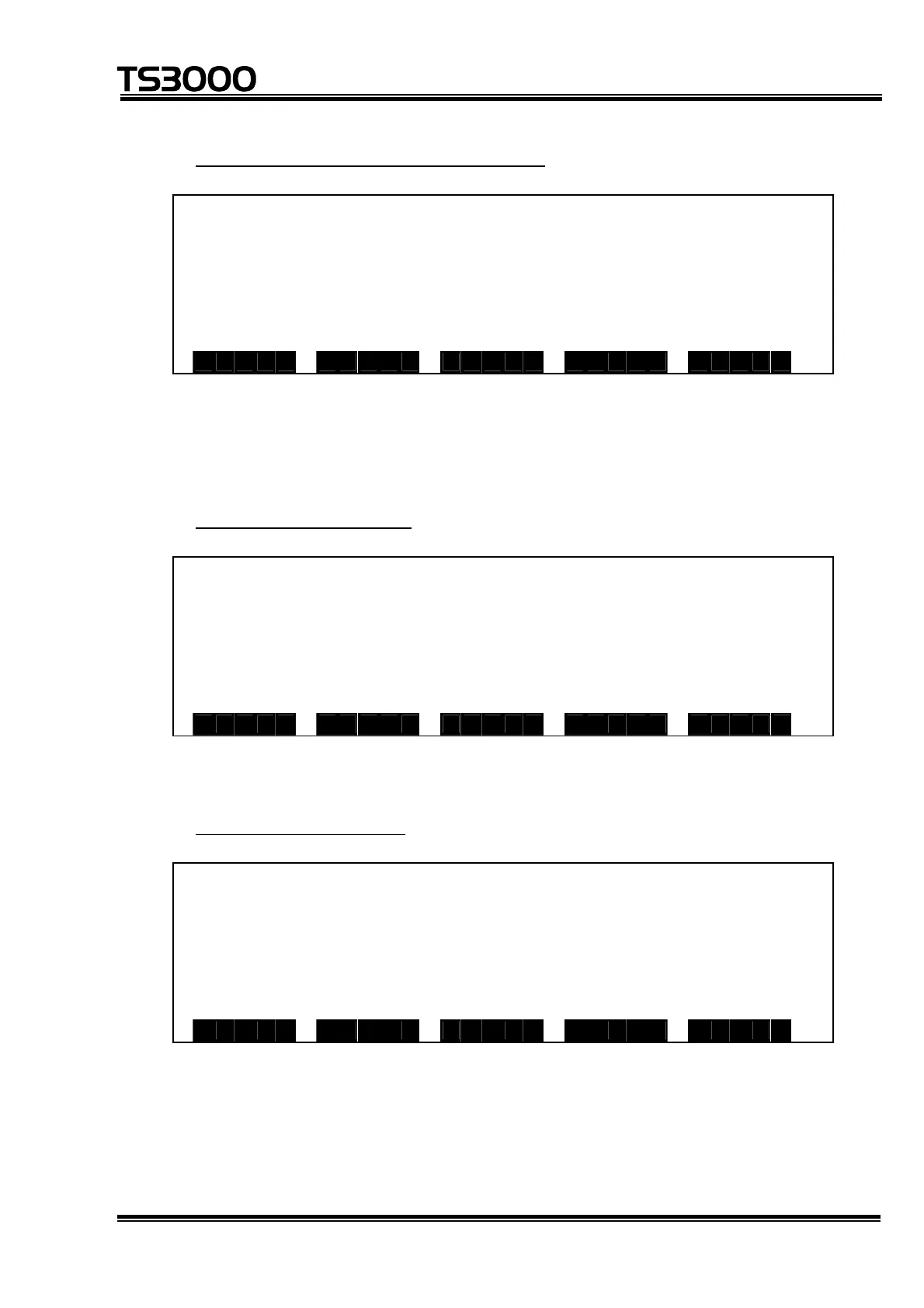
Position display in work coordinate system
W O R K
X : 0 . 0 0 0 W O R K : . w o r l d
Y : 0 . 0 0 0 T O O L :
Z : 0 . 0 0 0 B A S E : . w o r l d
C : 0 . 0 0 0
T : 0 . 0 0 0
J O I N T W O R L D W O R K P - C M D P - F B K
• A work coordinate of each axis is displayed.
• When confirming each coordinate name selected as WORK, TOOL, and
BASE coordinate systems, COORD is selected.
Position command display
P O S I T I O N C O M M A N D
E 1 : 0
E 2 : 0
E 3 : 0
E 4 : 0
E 5 : 0
J O I N T W O R L D W O R K P - C M D P - F B K
• Values of position command from each axis servo are displayed.
Position feedback display
P O S I T I O N F E E D B A C K
E 1 : 0 E 6 : 0
E 2 : 0 E 7 : 0
E 3 : 0 E 8 : 0
E 4 : 0
E 5 : 0
J O I N T W O R L D W O R K P - C M D P - F B K
• Values of position feedback from each axis servo are displayed.
(3) Caution
Current position display is also possible even during the automatic operation.

 Loading...
Loading...





