ZED-F9P-Integration Manual
UBX-18010802 - R02
3 Getting started Page 25 of 114
Advance Information
• Ensure all the required RTCM messages, most importantly RTCM 1005, are being received
regularly by viewing the messages in the UBX-RXM-RTCM view in u-center. See Figure 18
• Once the rover has started to receive valid RTCM messages, it will transition from 3D Fix to
3D/DGNSS to Float and to Fixed mode. This will only occur if it is receiving all required RTCM
messages, including RTCM 1005, and the signal conditions are sufficient. See Figure 19
• Note that the receiver by default will attempt a RTK Fix solution, however it can be configured to
use an RTK Float only solution by setting the CFG-NAVHPG-DGNSS configuration item.
If using VRS (Virtual Reference Station) the rover must output the NMEA GGA message and
this must be returned to the NTRIP caster. If this is not done the NTRIP caster will not provide
the rover with correction information. NMEA messages are enabled by default on the UART1,
I2C, SPI and USB interface. See the Virtual Reference Station section in the Appendix for more
information.
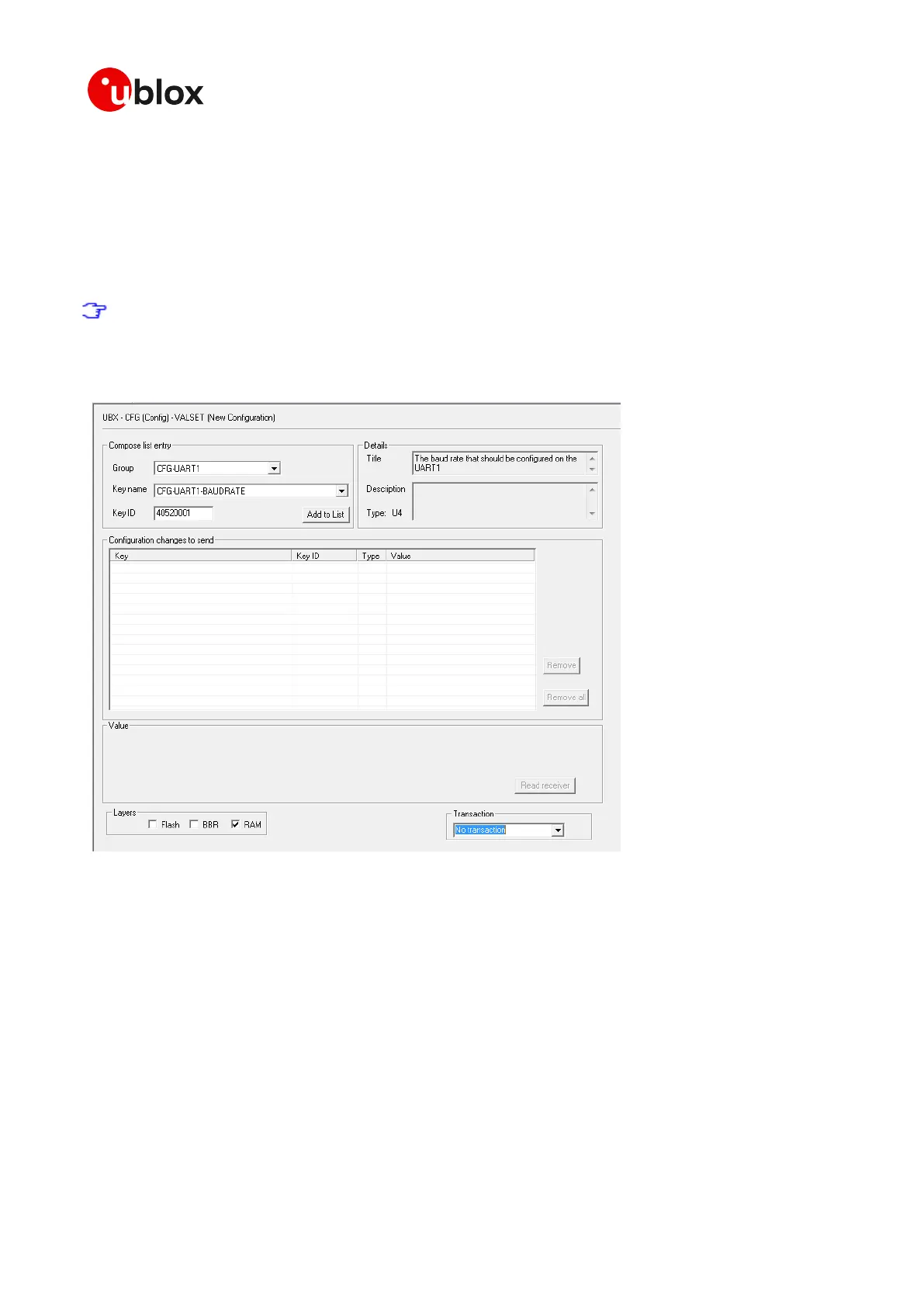
Figure 14: u-center UBX-CFG-VALSET message view
 Loading...
Loading...






