83
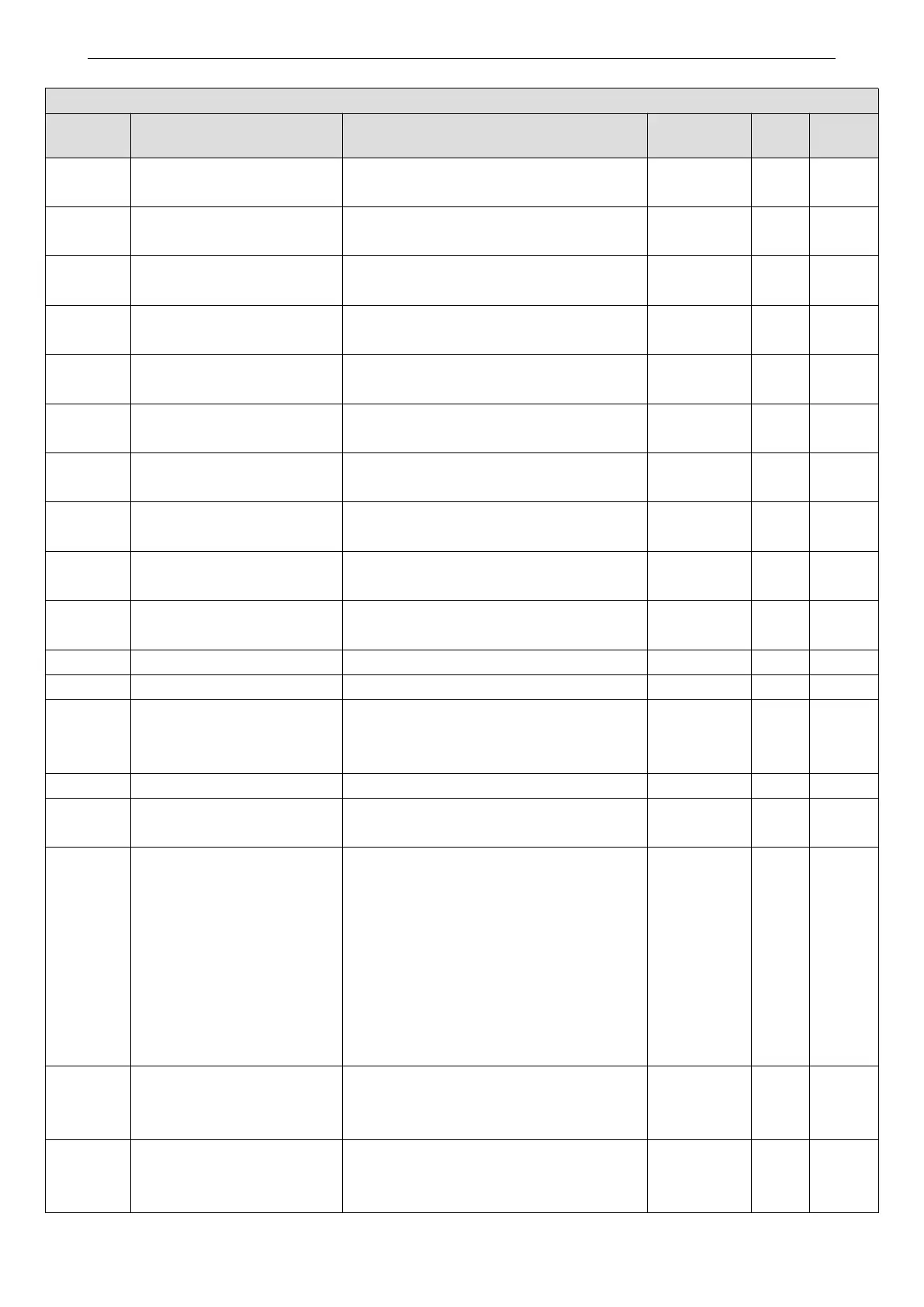
Group A2: Second motor parameters
Asynchronous motor stator
resistance
0.001Ω~65.535Ω (VFD power ≤55kW)
0.0001Ω~6.5535Ω (VFD power >55kW)
Asynchronous motor rotor
resistance
0.001Ω~65.535Ω (VFD power ≤55kW)
0.0001Ω~6.5535Ω (VFD power >55kW)
Leakage inductance of
asynchronous motor
0.01mH~655.35mH (VFD power ≤55kW)
0.001mH~65.535mH (VFD power >55kW)
asynchronous motor mutual
inductance
0.01mH~655.35mH (VFD power ≤55kW)
0.001mH~65.535mH (VFD power >55kW)
asynchronous motor current
without load
0.01A~P1-03 (VFD power ≤55kW)
0.1A~P1-03 (VFD power >55kW)
Synchronous motor rotor
resistance
0.001Ω~65.535Ω (VFD power ≤55kW)
0.0001Ω~6.5535Ω (VFD power >55kW)
Synchronous motor D-axis
inductance
0.01mH~655.35mH (VFD power ≤55kW)
0.001mH~65.535mH (VFD power >55kW)
Synchronous motor Q-axis
inductance
0.01mH~655.35mH (VFD power ≤55kW)
0.001mH~65.535mH (VFD power >55kW)
Synchronous motor back
EMF coefficient
0: ABZ incremental encoder
1: Resolver encoder
Encoder phase order/main
direction; only ABZ
incremental encoder
0: Forward direction
1: Reverse direction
Polar logarithm of rotation
Speed feedback PG
disconnection detection time
0.0~10.0 (0.0: Speed feedback
disconnection detection ineffective)
Motor 2 parameter
self-learning
Ones bit:
0: No operation
1: Static self learning 1(part of parameters)
2: Motor rotation self-learning
3: Static self learning 2 (part of parameters)
Tens bit:(supported by 3720 and above
version)
0: Asynchronous motor
1: Synchronous motor
0: VF control
1: no speed sensor vector control (SVC)
2: with speed sensor vector control (FVC)
Motor 2 acc/dec time
selection
0: same to first motor
1: acceleration and deceleration time 1
2: acceleration and deceleration time 2
 Loading...
Loading...