4-231
4
Operation
14. “UTILITY” mode
14.3 Changing the arm type
To set the hand type on SCARA robots that move using Cartesian coordinate data, follow
the procedure below. The right-handed system is selected when the parameters are
initialized.
(Arm type can be changed only for SCARA robots.)
[Procedure]
1) Press the
F 3
(ARMTYPE) key in “UTILITY” mode.
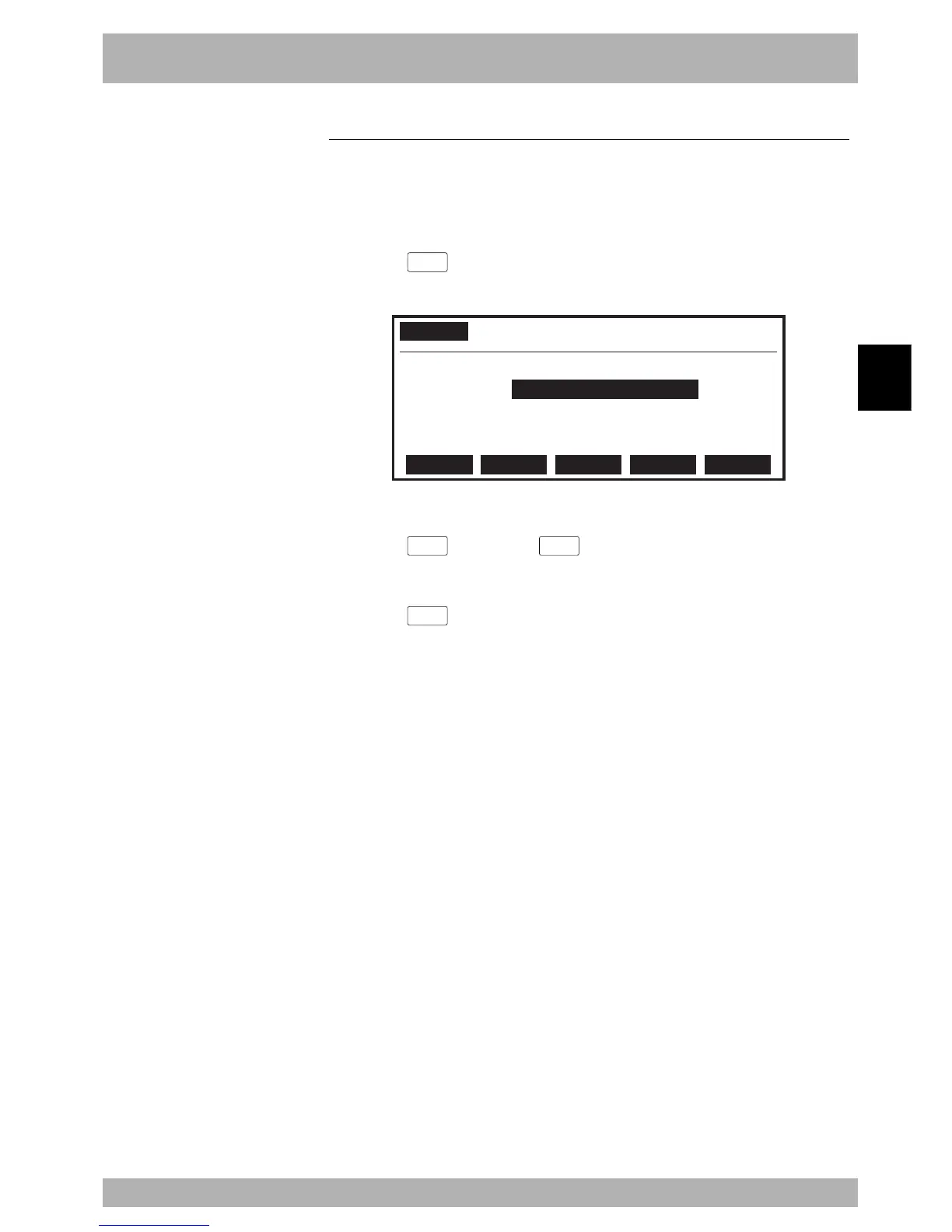
Fig. 4-14-7 Main/sub robot specifications
UTILITY>ARMTYPE
Armtype :
at Present :
Main robot
:
RIGHTY
Sub robot : LEFTY
RIGHTY LEFTY
2) Select the parameter item with the cursor (↑/↓) keys.
3) Press the
F 1
(RIGHTY) or
F 2
(LEFTY) key to set the right-handed or left-
handed system.
4) Press the
ESC
key to exit "UTILITY" mode.

 Loading...
Loading...








