5-4
Two-robot setting
5
2. Operations and data when using the two-robot setting
2) Use the
F 4
(VEL+),
F 5
(VEL-),
F 9
(VEL++),
F 10
(VEL--) keys to
change the speed for the currently selected group.
2.1.2 Executing the point trace
The point trace is executed in a group-specific manner.
Before executing this function, be sure to verify the currently selected group. The selected
group can be changed by the procedure described below.
[Procedure]
1) In the "AUTO" mode, press the
F 6
(Point) key.
2) Press the (
LOWER
+
MODE
) robot keys to toggle between the groups (the selected
group is displayed). An "[MG]" display indicates the main group, and "[SG]"
indicates the sub group.
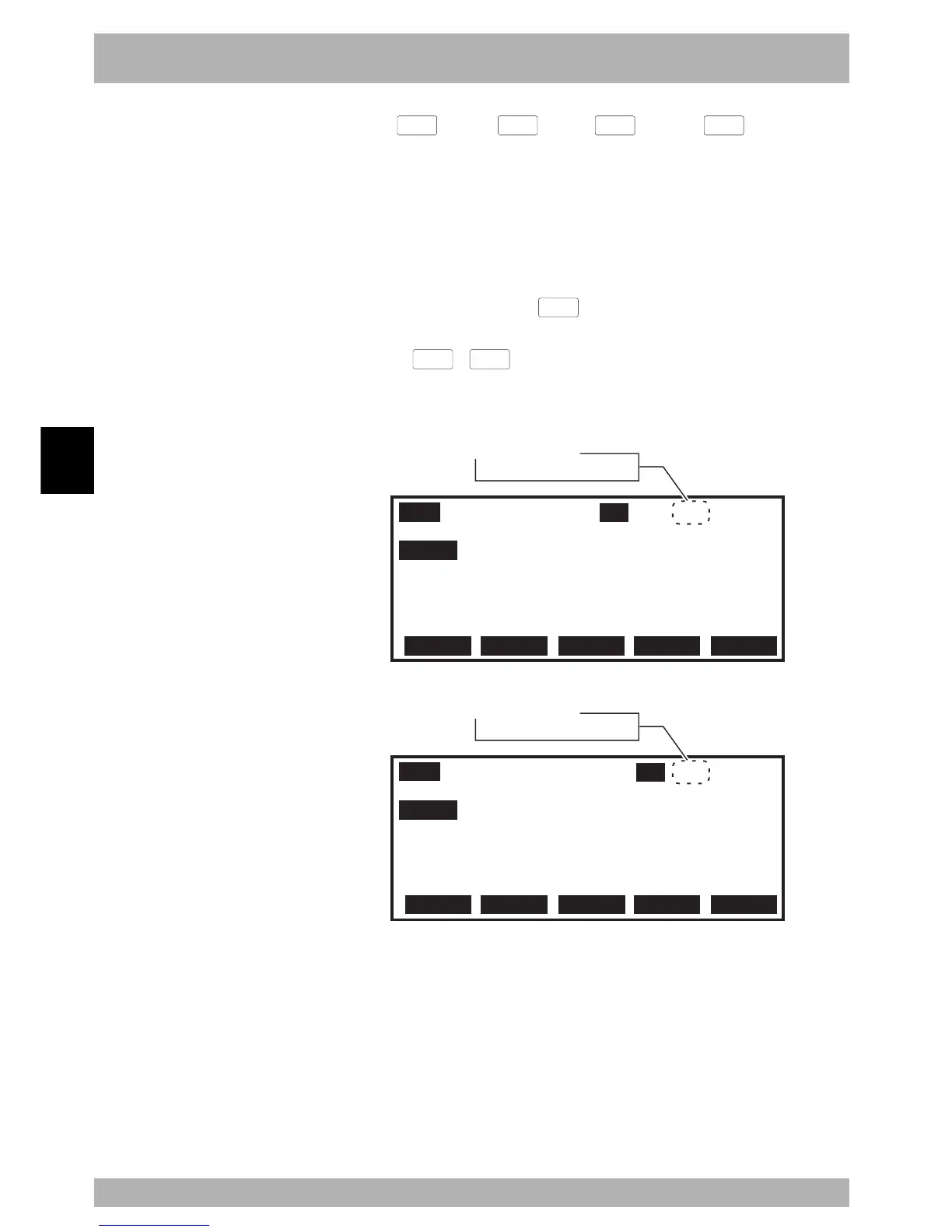
Fig. 5-2-3 Point trace screen (Two-robot setting: "Main group" selected)
AUTO POINT 50/100% [MG]
[S0H0J]
————————————x————
—
———y————
—
———z—————
—
——r———
P3 = 150.50 64.53 0.00 0.00
P4 = 96.65 224.89 0.00 0.00
P5 = 63432 19735 0 0
COMNT: [ ]
[POS] 0 0 0 0
>
PTP ARCH LINEAR
Subject group display
MG (Main group is selected)
Fig. 5-2-4 Point trace screen (Two-robot setting: "Sub group" selected)
AUTO POINT 50/100% [SG]
[S0H4J]
————————————x————
—
———y————
—
———z—————
—
——r———
P3 = 150.50 64.53 0.00 0.00
P4 = 96.65 224.89 0.00 0.00
P5 = 63432 19735 0 0
COMNT: [ ]
[POS] 0 0 0 0
>
PTP ARCH LINEAR
Subject group display
SG (Sub group is selected)
3) Select the motion mode for the point trace, then execute the point trace function.
n
NOTE
For details concerning executing the
point trace, also see "9.7 Executing
the point trace" in Chapter 4.
w
WARNING
The robot starts to move when
point trace is executed. Do not
enter the robot movement range
to avoid danger.

 Loading...
Loading...








