4-233
4
Operation
14. “UTILITY” mode
14.5 Changing the execution level
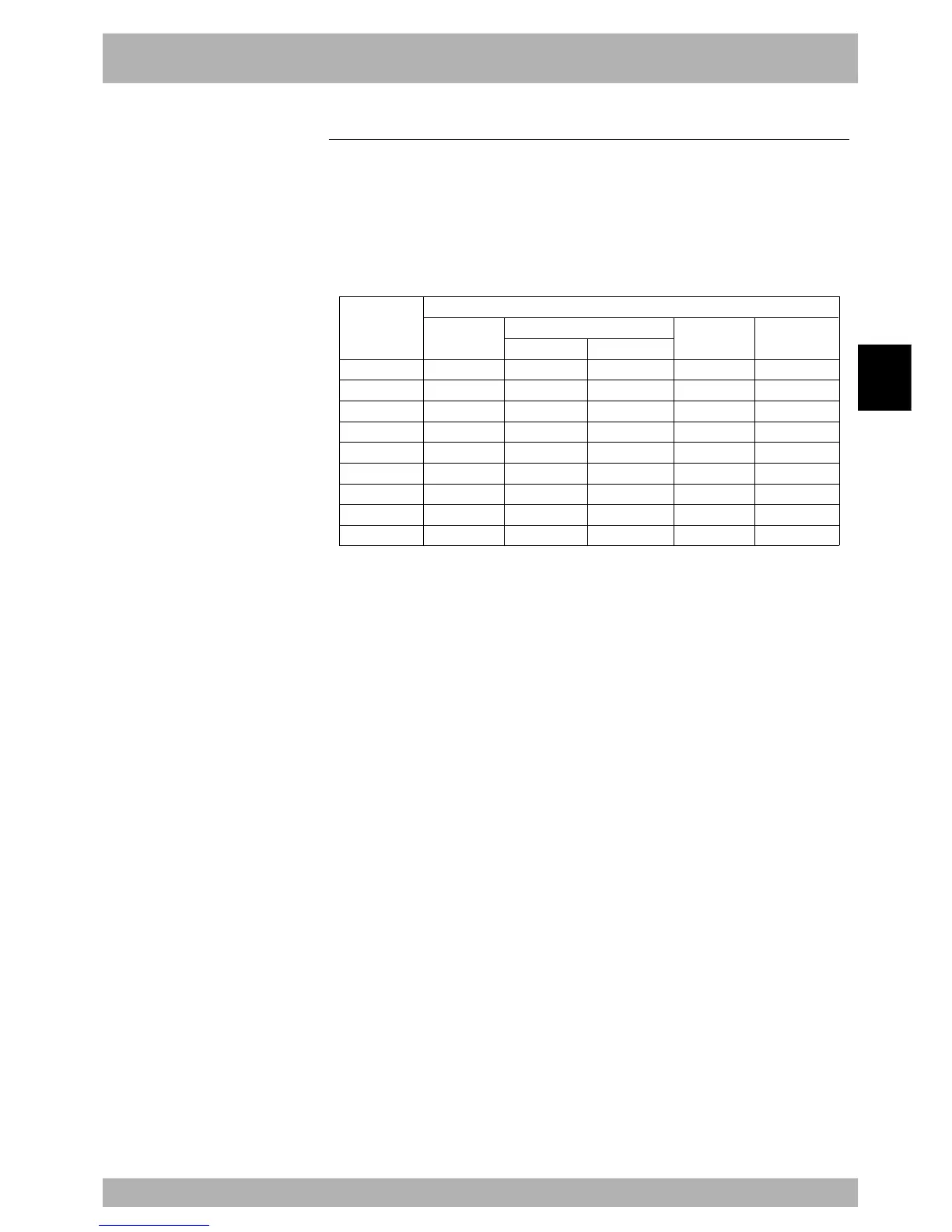
Program execution levels can be set as shown in the table below. However, the following
commands are usable only when return-to-origin is complete.
Movement commands : MOVE, MOVE2, MOVEI, MOVEI2, DRIVE,
DRIVE2, DRIVEI, DRIVEI2, PMOVE, PMOVE2,
PATH START
Position acquisition command : WHERE, WHERE2, WHRXY, WHRXY2
LEVEL0
LEVEL1
LEVEL2
LEVEL3
LEVEL4
LEVEL5
LEVEL6
LEVEL7
LEVEL8
Disabled
Enabled
Enabled
Enabled
Enabled
Enabled
Enabled
Enabled
Enabled
MANUAL mode
MANUAL mode
MANUAL mode
AUTO mode
AUTO mode
MANUAL mode
AUTO mode
AUTO mode
AUTO mode
NO
NO
YES
NO
YES
YES
YES
NO
YES
NO
NO
NO
NO
NO
YES
YES
NO
YES
Invalid
Invalid
Invalid
Invalid
Invalid
Invalid
Invalid
Valid
(Note 1)
Valid
(Note 1)
Level
Program
execution at
origin incomplete
When power is turned on
Mode Program reset
Return-to-origin
signal in AUTO
mode
Program reset
at program start
Description
Note 1: When the absolute reset input (DI17) is valid in “AUTO” mode, the "Robot
program-in-progress" (DO13) signal turns on during processing by the absolute
reset input (DI17).
n
NOTE
Execution level is automatically set to
“LEVEL 0” in the following cases.
1. When parameter data was
damaged.
2. When system generation data was
damaged.

 Loading...
Loading...








