5-25
5
Two-robot setting
2. Operations and data when using the two-robot setting
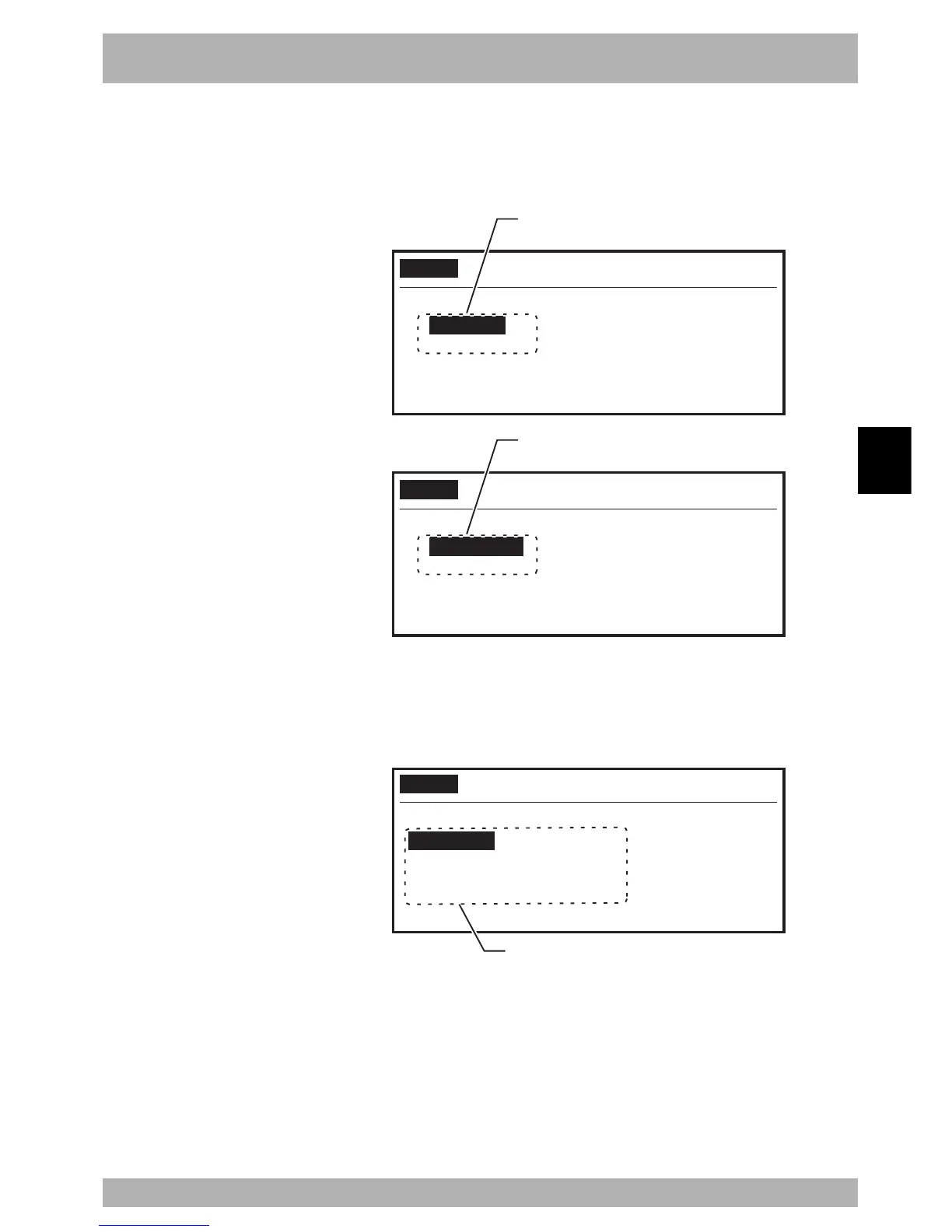
2.3.2 Robot parameters screen format
The SYSTEM>PARAM>ROBOT mode's robot parameter format for the two-robot setting
is shown below.
Fig. 5-2-40 Robot parameter setting screen
SYSTEM >PARAM>ROBOT V8.66
1.Tip weight[kg]
MR= 5
SR= 4
[0-200] Enter > 5
_
SYSTEM >PARAM>ROBOT V8.66
2.Origin sequence
MG= 312456
SG= 3124
312456
[0-654321] Enter >
_
MR=<value> ...Main robot parameters
SR=<value> ...Sub robot parameters
MG=<value> ...Main group parameters
SG=<value> ...Sub group parameters
2.3.3 Axis parameters screen format
The SYSTEM>PARAM>AXIS mode's axis parameter format for the two-robot setting is
shown below.
Fig. 5-2-41 Axis parameters setting screen
SYSTEM>PARAM>AXIS
V8.66
1.Accel coefficient[%]
M1=
100
M2=
100
S1= 100 S2= 100
100
[1-100]
Enter >
_
M?=<value> ...Main robot axis setting
S?=<value> ...Sub robot axis setting
* "?" denotes the axis number
When additional axes exist:
m?=<value> ...Main additional axis setting
s?=<value> ...Sub additional axis settin
n
NOTE
For "robot parameters screen format"
details, also see 12.1.1 "Robot
Parameters" in Chapter 4.
n
NOTE
For "axis parameter screen format"
details, also see "12.1.2 Axis
Parameters" in Chapter 4.

 Loading...
Loading...








