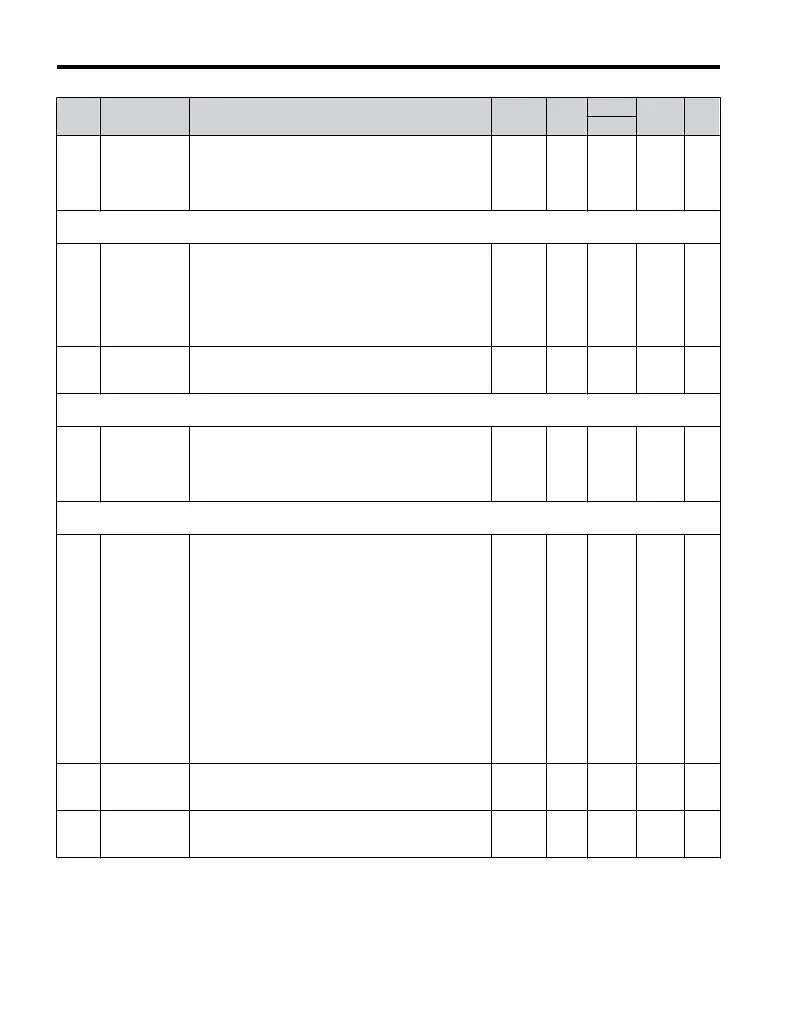
No. Name Description Range Def.
Mode
Addr.
Hex
Pg.
V/f
L3-06
Stall
Prevention
Level during
Run
Enabled when L3-05 is set to "1" or "2". 100% is equal
to the drive rated current.
Decrease the set value if stalling or excessive current
occurs with the default settings.
Upper level is determined by C6-01 and L8-38.
30 to 150
<7>
O 494 —
L4: Frequency Detection
Use L4 parameters to configure frequency detection operation.
L4-01
Speed
Agreement
Detection
Level
These parameters configure the multi-function output
(H2-01 = 2, 4, 5) settings "Speed
Agree 1", "User Set
Speed Agree 1", "Frequency Detection 1," and
"Frequency detection 2".
Parameter L4-01 sets the level while parameter L4-02
sets the hysteresis for the Speed Detection Output
Function.
0.0 to
400.0
0.0
Hz
O 499 —
L4-07
Frequency
Detection
Conditions
0: No detection during baseblock.
1: Detection always enabled.
0, 1 0 O 470 —
L5: Fault Reset
Use L5 parameters to configure Automatic Restart after fault.
L5-01
Number of
Auto Restart
Attempts
Sets the counter for the number of times the drive
attempts to restart when one of the following faults
occurs: oC, ov, PF, rH, rr, oL1, oL2, oL3, Uv1.
When the drive operates without fault for
10 minutes,
the counter will be reset.
0 to 10 0 O 49E —
L6: Overtorque Detection
Use L6 parameters to configure overtorque detection.
L6-01
Torque
Detection
Selection 1
Selects the overtorque operation. Overtorque is
determined by the settings in parameters L6-02 and
L6-03. The multi-function output settings (H2-01= B
and 17) are also active if programmed.
0: Disabled
1: oL3 at Speed Agree - Alarm (overtorque detection
only active during Speed Agree and operation
continues after detection).
2: oL3 at RUN - Alarm (overtorque detection is
always
active and operation continues after detection).
3: oL3 at Speed Agree - Fault (overtorque detection
only active during Speed Agree and drive output will
shut down on an oL3 fault).
4: oL3 at RUN - Fault (overtorque detection is always
active and drive output will shut down on an oL3
fault).
0 to 4 0 O 4A1 —
L6-02
Torque
Detection
Level 1
Sets the overtorque detection level. 100% is equal to
the motor rated current.
0 to 300 150% O 4A2 —
L6-03
Torque
Detection
Time 1
Sets the length of time an overtorque condition must
exist before Torque Detection is triggered.
0.0 to
10.0
0.1 s O 4A3 —
B.2 Parameter Table
212
YASKAWA ELECTRIC TOEP C710606 25B YASKAWA AC Drive J1000 Installation & Start-Up Manual
2/6/2008-14:44
 Loading...
Loading...







