4.11 Fine Tuning during Test Runs (Adjust the Control Function)
156 YASKAWA SIEPC71061753C GA500 Technical Manual
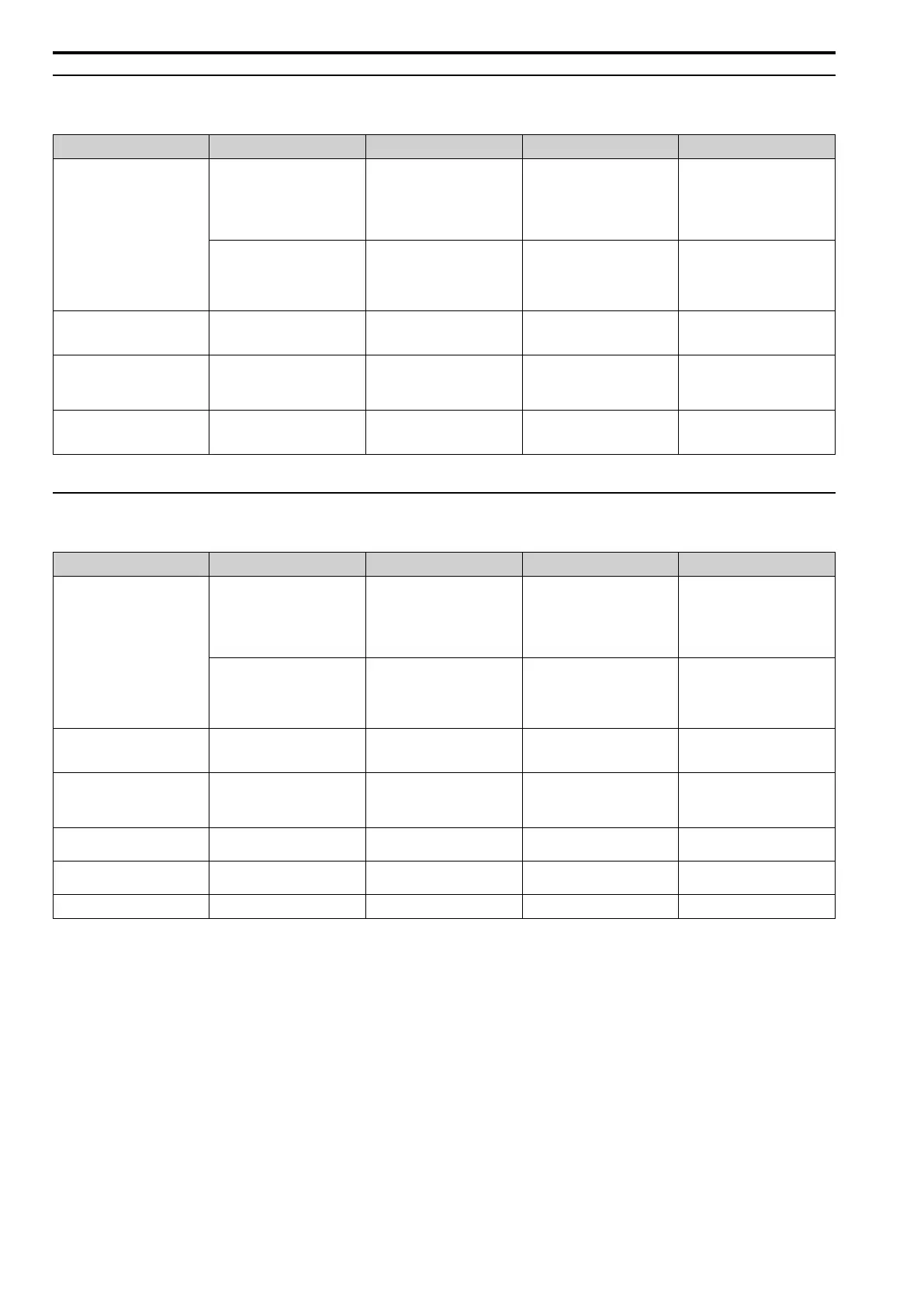
◆ Advanced Open Loop Vector Control Method for PM Motors
Table 4.21 Parameters for Fine Tuning the Drive (A1-02 = 6 [AOLV/PM])
Issue Parameter Number Possible Solutions Default Recommended Setting
• Unsatisfactory motor torque
and speed response
• Hunting or oscillation
• High speed
C5-01 [ASR Proportional Gain
1]
• Low speed
C5-03 [ASR Proportional Gain
2]
• If torque or speed response are
slow, increase the setting value
in increments of 5.00.
• If hunting or oscillation occur,
decrease the setting value.
10.00 5.00 to 30.00
*1
• High speed
C5-02 [ASR Integral Time 1]
• Low speed
C5-04 [ASR Integral Time 2]
• If torque or speed response are
slow, decrease the setting
value.
• If hunting or oscillation occur,
increase the setting value.
0.500 s 0.300 s to 1.000 s
*1
The drive cannot find ASR
proportional gain or integral time
for low speed or high speed.
C5-07 [ASR Gain Switchover
Frequency]
Change the ASR proportional
gain and ASR integral time to
conform to the output frequency.
0.0% 0.0% to maximum rotation speed
Hunting or oscillation C5-06 [ASR Delay Time]
If the rigidity of the machine is
unsatisfactory and vibration is
possible, increase the setting
value in increments of 0.010.
0.016 s 0.016 s to 0.035 s
*1
Step-out
E1-xx parameters, E5-xx
parameters
Refer to the motor nameplate or
test report and set E1-xx or E5-xx
correctly.
- -
*1 The best values for a no-load operation are different than the best values for actual loading operation.
◆ EZ Open Loop Vector Control Method
Table 4.22 Parameters for Fine Tuning the Drive (A1-02 = 8 [EZOLV])
Issue Parameter Number Possible Solutions Default Recommended Setting
• Unsatisfactory motor torque
and speed response
• Hunting or oscillation
• High speed
C5-01 [ASR Proportional Gain
1]
• Low speed
C5-03 [ASR Proportional Gain
2]
• If torque or speed response are
slow, increase the setting value
in increments of 5.00.
• If hunting or oscillation occur,
decrease the setting value.
10.00 10.00 to 50.00
*1
• High speed
C5-02 [ASR Integral Time 1]
• Low speed
C5-04 [ASR Integral Time 2]
• If torque or speed response are
slow, decrease the setting
value.
• If hunting or oscillation occur,
increase the setting value.
0.500 s 0.300 s to 1.000 s
*1
The drive cannot find ASR
proportional gain or integral time
for low speed or high speed.
C5-07 [ASR Gain Switchover
Frequency]
Change the ASR proportional
gain and ASR integral time to
conform to the output frequency.
0.0% 0.0% to maximum rotation speed
Hunting or oscillation C5-06 [ASR Delay Time]
If the rigidity of the machine is
unsatisfactory and vibration is
possible, increase the setting
value in increments of 0.010.
0.004 s 0.004 s to 0.020 s
*1
Step-out E9-xx parameters
Refer to the motor nameplate or
test report and set E9-xx correctly.
- -
Oscillation when the motor starts.
n8-51 [Accel / Decel Pull-In
Current]
Increase the setting value. 80% Increase in increments of 5%.
Motor stalls. L7-01 to L7-04 [Torque Limit] Increase the setting value. 200% Increase in increments of 10%.
*1 The best values for a no-load operation are different than the best values for actual loading operation.

 Loading...
Loading...







