Parameter Details
5
5.2 b: Application
YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference 193
2. The Run command is removed and the drive coasts to stop.
3. The drive will set the coast-timer based on b1-11:
• When b1-11 = 0.0 s, C1-02 [Deceleration Time 1] and the output frequency set the coast-timer.
• When b1-11 > 0.0 s, b1-11 is the coast-timer.
4. When the drive receives the Run command again during the time set in b1-11, the drive will restart when the
timer expires and it is not necessary to cycle the Run command.
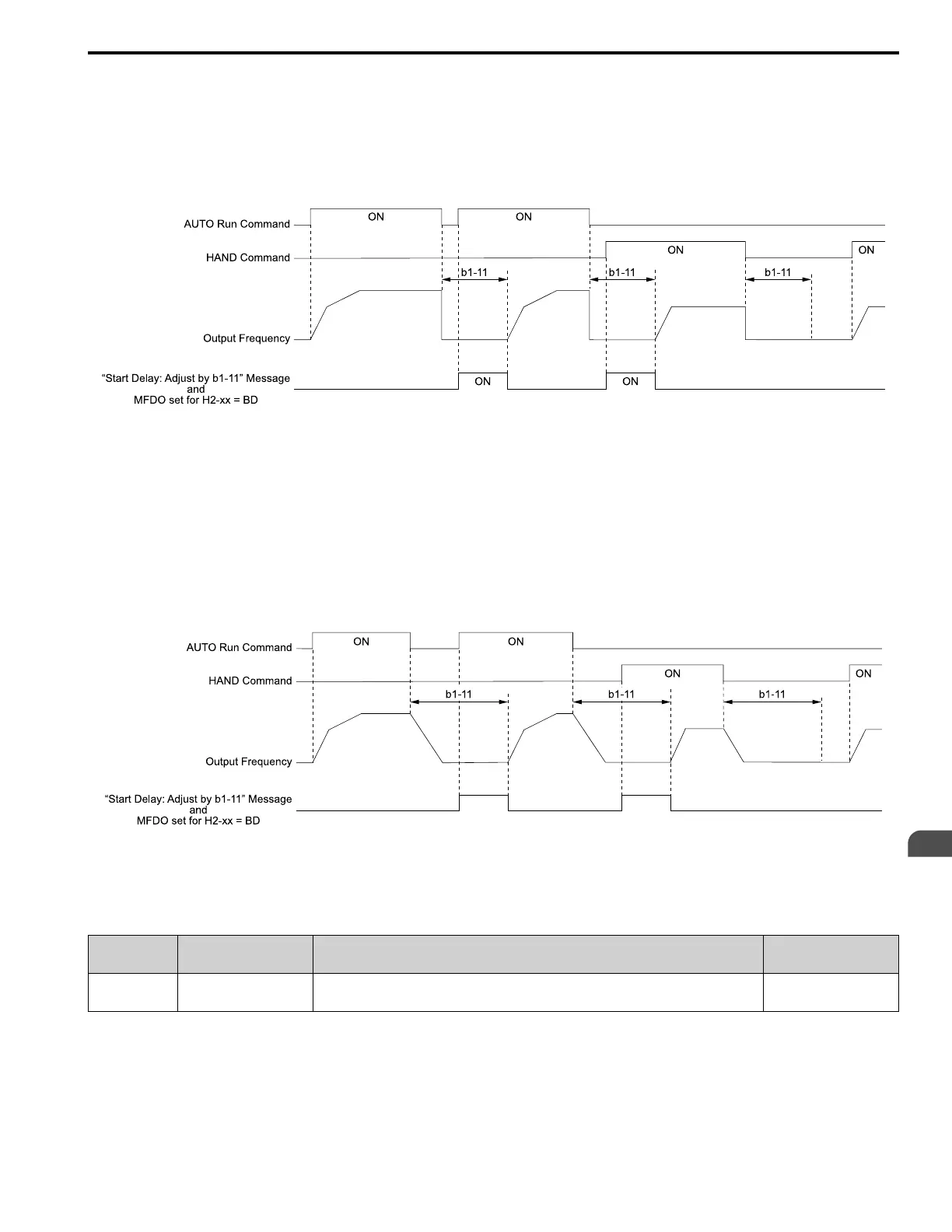
b1-11: Run Delay @ Stop H2-xx = BD: Start Delay
Figure 5.9 Coast To Stop With Timer when b1-11 > 0
Ramp to Stop, Coast to Stop or DC Injection to Stop Functions when b1-03 ≠ 3
When b1-03 = 0 or 2 [Ramp to Stop or DC Injection Braking to Stop], the drive operates as:
1. The drive operates at an output frequency > 0.
2. When you remove the Run command or the drive goes to sleep, the b1-11 timer immediately starts while ramping
or coasting.
3. When the drive receives the Run command again during the time set in b1-11, the drive will restart when the
timer expires and it is not necessary to cycle the Run command.
b1-11: Run Delay @ Stop H2-xx = BD: Start Delay
Figure 5.10 Ramp To Stop when b1-11 > 0
■ b1-12: Run Delay Memory Selection
No.
(Hex.)
Name Description
Default
(Range)
b1-12
(01E0)
Run Delay Memory
Selection
Sets how the drive saves the Run Delay Timer to the EEPROM during power loss. 2
(0 - 2)
0 : Disabled
The drive does not save the Run Delay timer during power loss.
When the drive power is restored, the drive will not apply the delay time set in b1-11 [Run Delay @ Stop].
Figure 5.11 shows the example of drive operation when:
• b1-03 = 3 [Stopping Method Selection = Coast to Stop with Timer]

 Loading...
Loading...









