Startup Procedure and Test Run
4
4.7 Fine Tuning during Test Runs (Adjust the Control Function)
YASKAWA SIEPYAIH6B01A HV600 AC Drive Bypass Technical Reference 171
4.7 Fine Tuning during Test Runs (Adjust the Control
Function)
This section gives information about the adjustment procedures to stop hunting or oscillation errors caused by control
function during a test run. Adjust the applicable parameters as specified by your status.
Note:
This section only lists frequently adjusted parameters. If you must adjust parameters that have a higher degree of precision, contact Yaskawa.
◆ V/f Control
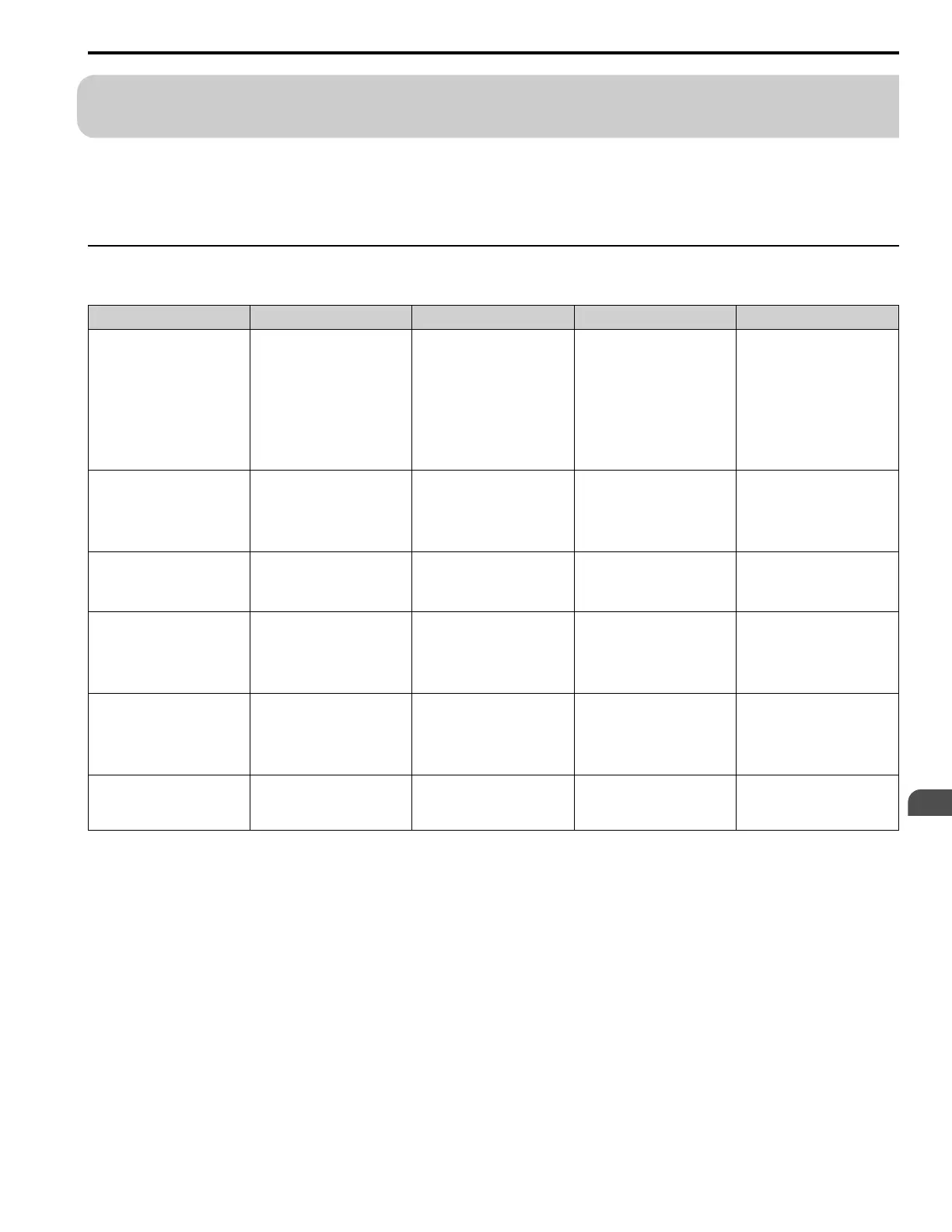
Table 4.8 Parameters for Fine Tuning the Drive (V/f)
Issue Parameter Number Possible Solutions Default Recommended Setting
Hunting or oscillation at mid-range
speeds (10 Hz to 40 Hz)
n1-02 [Hunting Prevention Gain
Setting]
• If torque is not sufficient with
heavy loads, decrease the
setting value.
• If hunting or oscillation occur
with light loads, increase the
setting value.
• If hunting occurs with a low-
inductance motor, for example a
motor with a larger frame size
or a high-frequency motor,
lower the setting value.
1.00 0.10 - 2.00
• The volume of the motor
excitation sound is too high.
• Hunting or oscillation at low
speeds (10 Hz or lower), or at
mid-range speeds (10 Hz to 40
Hz)
C6-02 [Carrier Frequency
Selection]
• If the volume of the motor
excitation sound is too high,
increase the carrier frequency.
• If hunting or oscillation occur at
low or mid-range speeds,
decrease the carrier frequency.
1 (2 kHz)
*1
1 to upper limit value
• Unsatisfactory motor torque
and speed response
• Hunting or oscillation
C4-02 [Torque Compensation
Delay Time]
• If torque or speed response are
slow, decrease the setting value.
• If hunting or oscillation occur,
increase the setting value.
200 ms
*1
100 - 1000 ms
• Torque at low speeds (10 Hz or
lower) is not sufficient.
• Hunting or oscillation
C4-01 [Torque Compensation
Gain]
• If torque at low speeds (10 Hz
or lower) is not sufficient,
increase the setting value.
• If hunting or oscillation occur
with light loads, decrease the
setting value.
1.00 0.50 - 1.50
• Torque at low speeds (10 Hz or
lower) is not sufficient.
• Large initial vibration at start
up.
• E1-08 [Mid Point A Voltage]
• E1-10 [Minimum Output
Voltage]
• If torque at low speeds (10 Hz
or lower) is not sufficient,
increase the setting value.
• If there is large initial vibration
at start up, decrease the setting
value
• E1-08: 15.0 V
*2
• E1-10: 9.0 V
*2
Default setting +/- 5 V
*3
Speed precision is unsatisfactory.
(V/f Control)
C3-01 [Slip Compensation Gain]
Set E2-01 [Motor Rated Current],
E2-02 [Motor Rated Slip], and E2-
03 [Motor No-Load Current], then
adjust C3-01.
0.0 (no slip compensation) 0.5 - 1.5
*1 The default setting changes when the setting for o2-04 [Drive Model (KVA) Selection] changes.
*2 The default setting changes when the setting for E1-03 [V/f Pattern Selection] changes.
*3 Recommended settings are for 208/240 V. Multiply the voltage by 2 for 480 V.

 Loading...
Loading...









