3.1 Home Position Calibration
3-3
3.1.2
Calibrating Operation
"
Registering All Axes at On Time
*1
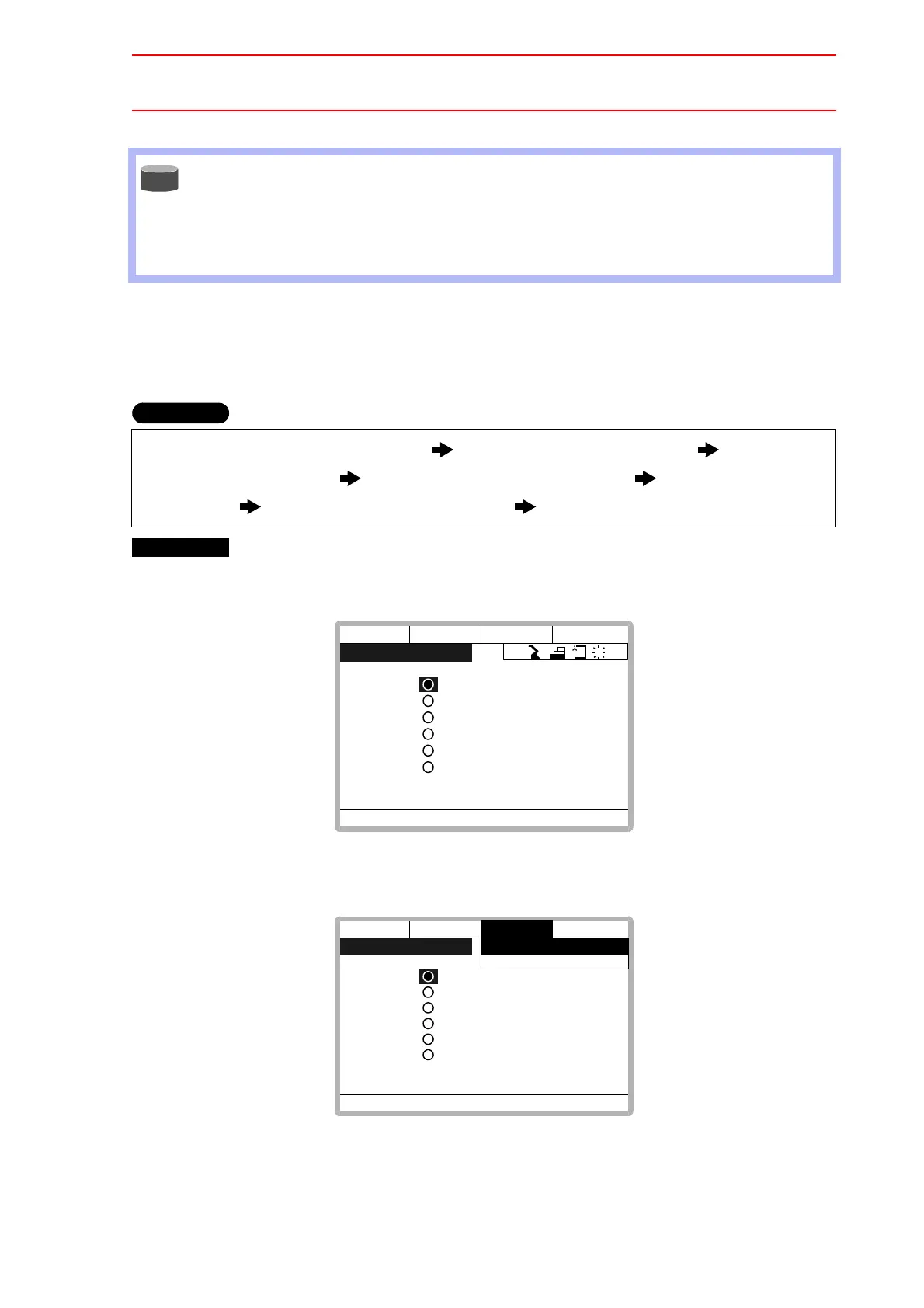
The home position calibration display is shown.
*2
The pull down menu appears.
Home Position
The home position is the pulse value "0" for each axis. The relative values between the
home position and the geometry position are set to parameters. The relative values are
specified as an angle in units of 1/1000
°
, and vary for different manipulator types. See "
3.1.3 Home Position of the Robot ".
Select {ROBOT} under the top menu Select {HOME POSITION}
*1
Select {DIS-
PLAY} under the menu
*2
Select the desired control group Select {EDIT} under
the menu
*3
Select {SELECT ALL AXES}
*4
Select “YES”
*5
SUPPLE-
MENT
Operation
Explanation
HOME POSITIONING
SELECT ABSOLUTE DATA
R1:S *
L *
U *
R *
B *
T *
!
DATA
EDIT DISPLAY UTILITY
R1
S
C
L
HOME POSITIONING
SELECT ABSOLUTE DATA
R1:S *
L *
U *
R *
B *
T *
!
R1
S
C
L
DATA
EDIT DISPLAY UTILITY
ROBOT1
STATION1
ROBOT1
DISPLAY
 Loading...
Loading...





