7.3 I/O Contactor Unit
7-11
"
Safety Plug Input Signal
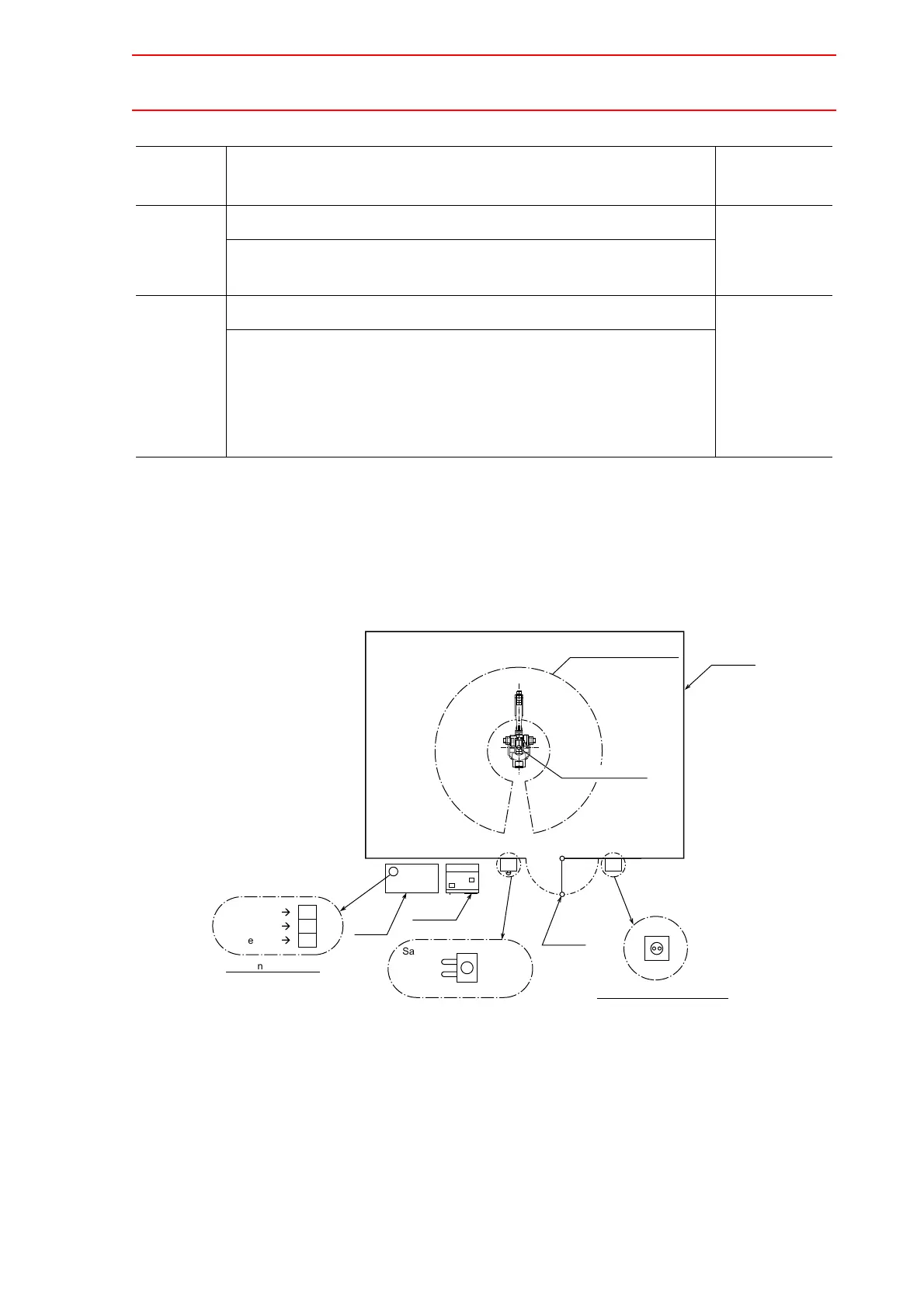
The manipulator must be surrounded by a safeguard and a door protected by an interlock
function. The door must be opened by the technician to enter and the interlock function stops
the robot operation when the door is open. The safety plug input signal is connected to the
interlock signal from the gate.
If the servo power is ON when the interlock signal is input, the servo power turns OFF. The
servo power cannot be turned ON while the interlock signal is input. However, the servo power
does not turn OFF when the door is opened only during the TEACH mode. In this case, the
servo power can be turned ON while the interlock signal is input.
DIN
CN06 -7
-8
Direct-in 4
Open
Used for the search function.
FORCE
CN06 -9
-10
Forced reset, input
Open
Do not use the “FORCE” (Forced release) input.
If the “FORCE” input should be used for an unavoidable reason, be
sure to use a switch with a key. The systems manager is responsible
for storage of the key.
When “FORCE” is input, all the deadman switches become invalid,
so handle with extreme care.
Specific Input List (XIO01)
Terminal Input Name / Function
Factory
Setting
Safeguard
R
Y
G
Abnormal
à
Safety Plug
Emergency
Stop
Taked Plug
Teach
à
Operating
à
Signal Tower
Receptacle for Teaching
Controller
YASNAC
Door
Safeguard
Manipulator Working Area
Servo ON Lamp
XRC
 Loading...
Loading...





