1 Outline
1.3 What MotoPlus Can Do
1-2
HW1484528
HW1484528
1.3 What MotoPlus Can Do
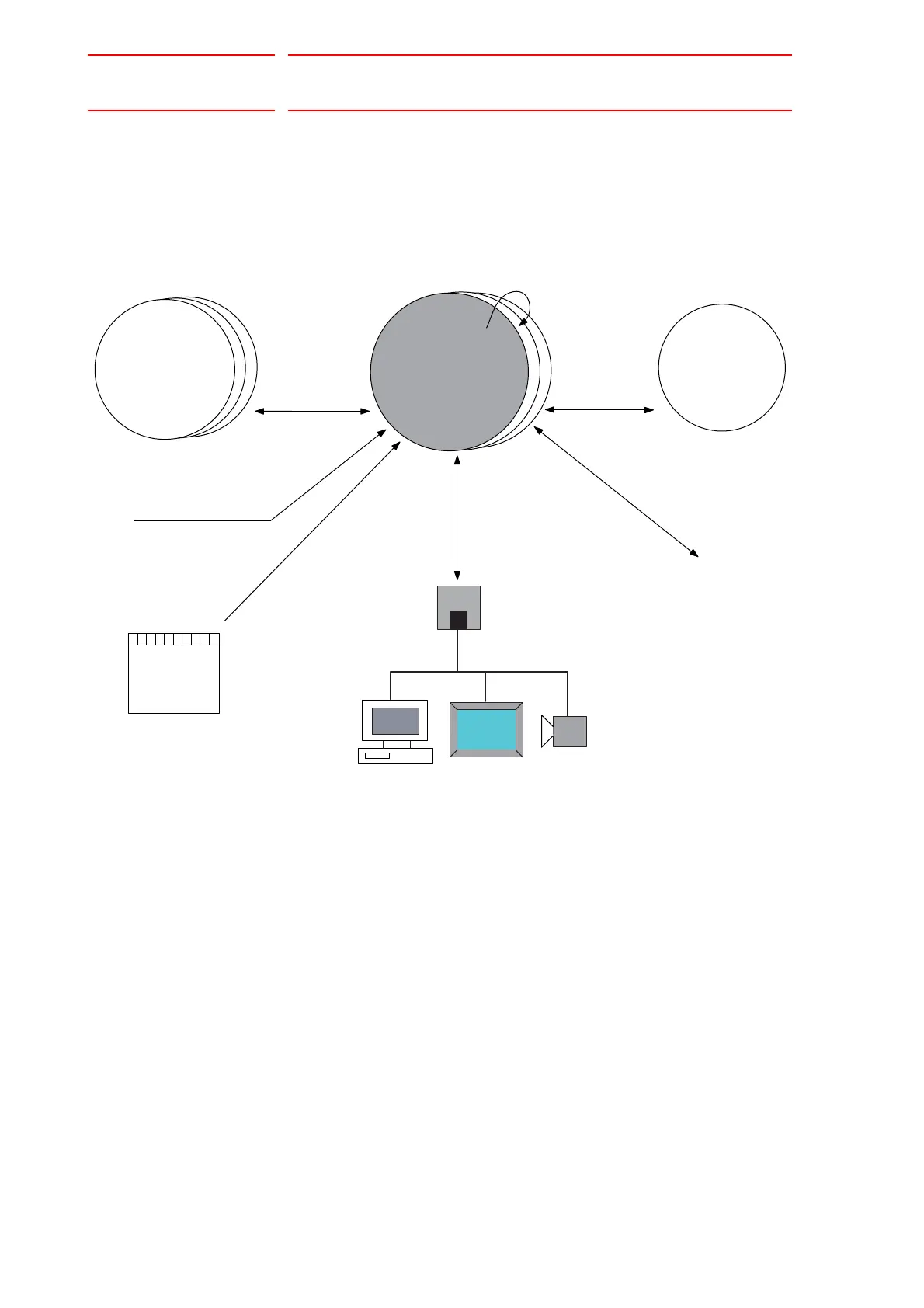
Users can use the C language, a general programming language, and the
C language and MotoPlus libraries to develop a customer specific
application program in which various types of resources are used, e.g.,
the Ethernet communication port and the programming pendant of the
robot controller. Refer to fig. 1-1 “Available Resources for MotoPlus” .
Fig. 1-1: Available Resources for MotoPlus
Application program examples:
1. Operation to correct the manipulator position by a communication
program with a vision sensor or other sensors, and by data from the
sensor
2. Data transmission with an external PC via the Ethernet (TCP/IP)
communication
3. JOB execution sequence control
PP
(Socket
communication
Ethernet)
JOB task Application task
CIO
SD
card
Ethernet
(ACP31 SD file)
(RJ45)
Vision
Data transmission
(File input)
Data transmission
(Winsock)
Data transmission
Data transmission
PC
Power
ON
Panel computer
Load from the SD / start

 Loading...
Loading...







