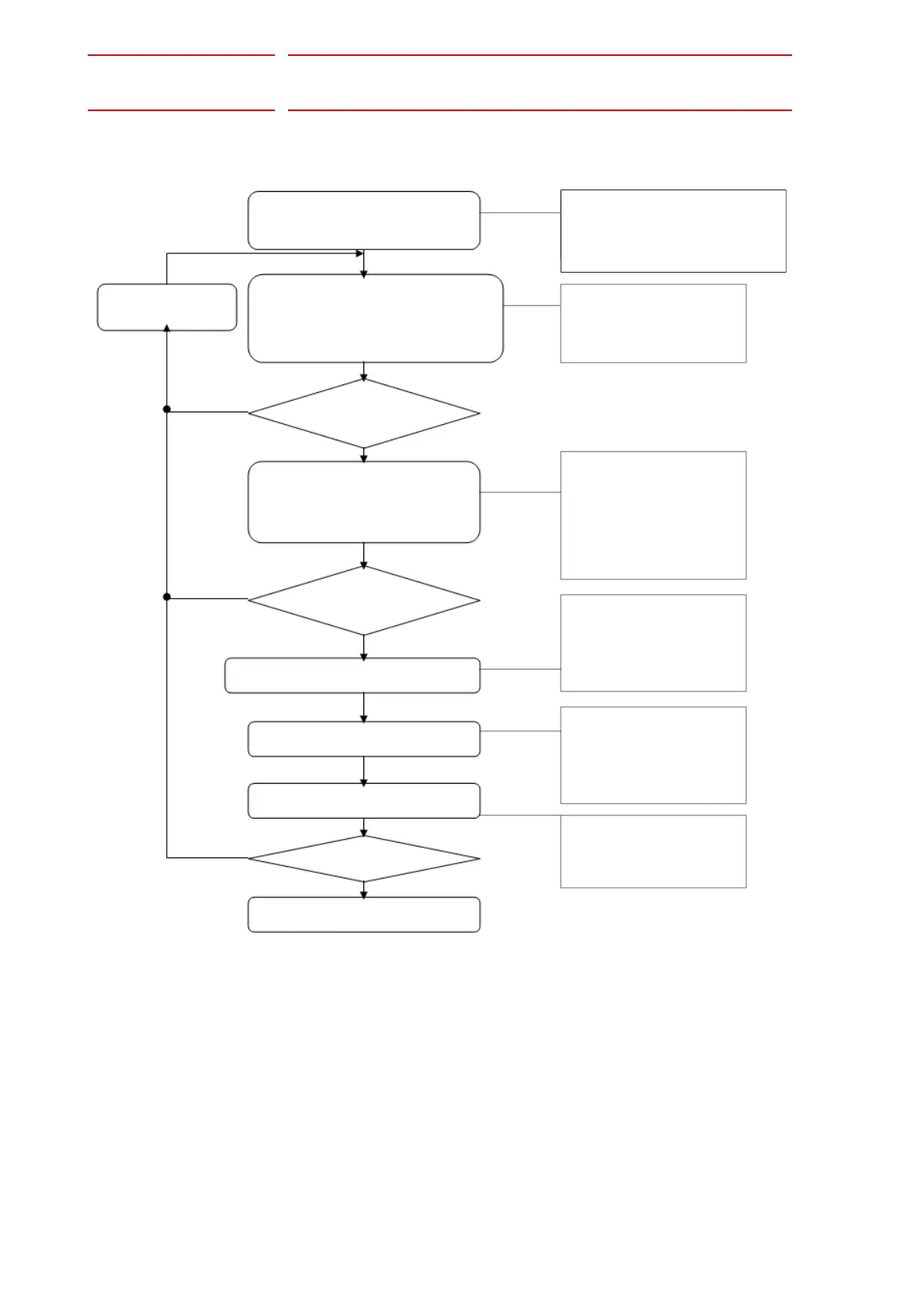
Fig. 1-4: Program Development Flow
Modify the program
No compile error?
No compile error?
Start the application program.
Debug.
OK?
Development completed.
Load the application program into the robot controller.
Write the source program in
C language by using the editor
of MotoPlus IDE.
<3.2 Creating MotoPlus Project>
Use GNU C compiler provided
by YASKAWA (included in
MotoPlus IDE).
Link the above-mentioned object
modules with the C language library
and the robot library to create the
execution module (e.g. MotoPlusApl.out).
<3.2 Creating MotoPlus Project>
Use GNU linker and library.
Only static links are supported.
ELF (Executable and Linkable
Format) is used as the module.
Compiling and linking are done
simultaneously by MotoPlus IDE.
<4.1 Installation of Application
Program in Maintenance Mode>
Relocatable module with
ELF object format.
<4.2 Start-up of Application
Program>
1. Starts with turning ON the power.
<5. Debugging>
Debug by connecting to SHELL,
system software, via TELNET.
Use printf() and puts().
By using MotoPlus IDE, compile
the source program (e.g. abc.c) and
create an application program
(e.g. abc.o).
<3.1 Rules for Creating Program Source Code>
Use the editor of MotoPlus IDE.
Notepad, WordPad, or another
text editor can also be used.

 Loading...
Loading...







