Defines the signal that activates the jogging function. The jogging function is
typically used to control a cyclical movement of a machine section. One push
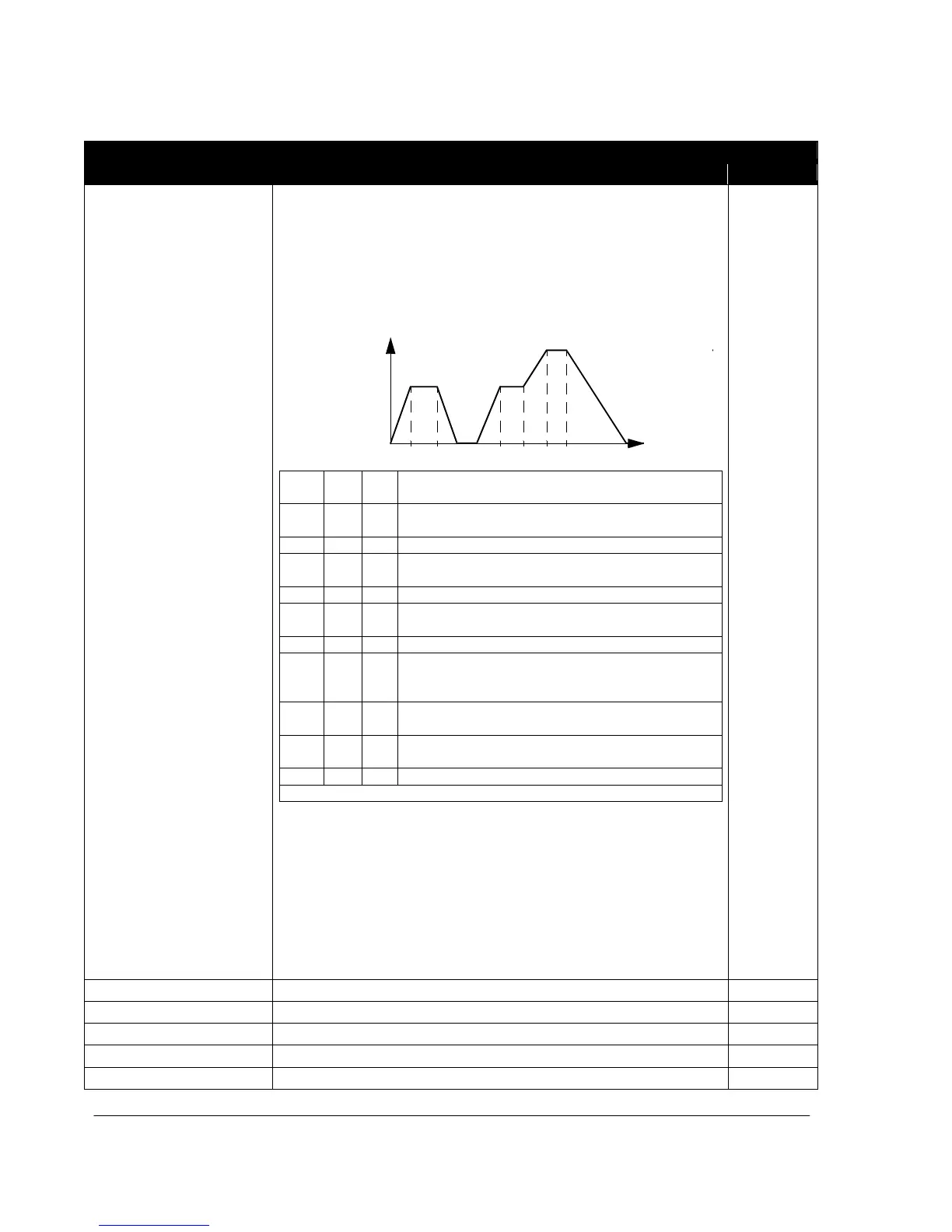
button controls the drive through the whole cycle: When it is on, the drive
starts, accelerates to a preset speed at a preset rate. When it is off, the drive
decelerates to zero speed at a preset rate.
The figure below describes the operation of the drive. It also represent how
the drive shifts to normal operation (= jogging inactive) when the drive start
command is switched on. Jog cmd = state of the jogging input, Start cmd =
state of the drive start command.
Speed
t
1 2 3 4 5 6 7 8 9 10
Note: The jogging is not operational when the drive start command is on.
Note: The jogging speed overrides the constant speeds (12 CONSTANT
SPEEDS).
Note: The ramp shape time (2207 RAMP SHAPE 2) must be set to zero
during jogging (that is, linear ramp).
Jogging speed is defined by parameter 1208 CONST SPEED 7, acceleration
and deceleration times are defined by parameters 2205 ACCELER TIME 2
and 2206 DECERLER TIME 2. See also parameter 2112 ZERO SPEED
DELAY.

 Loading...
Loading...








