Safety functions 185
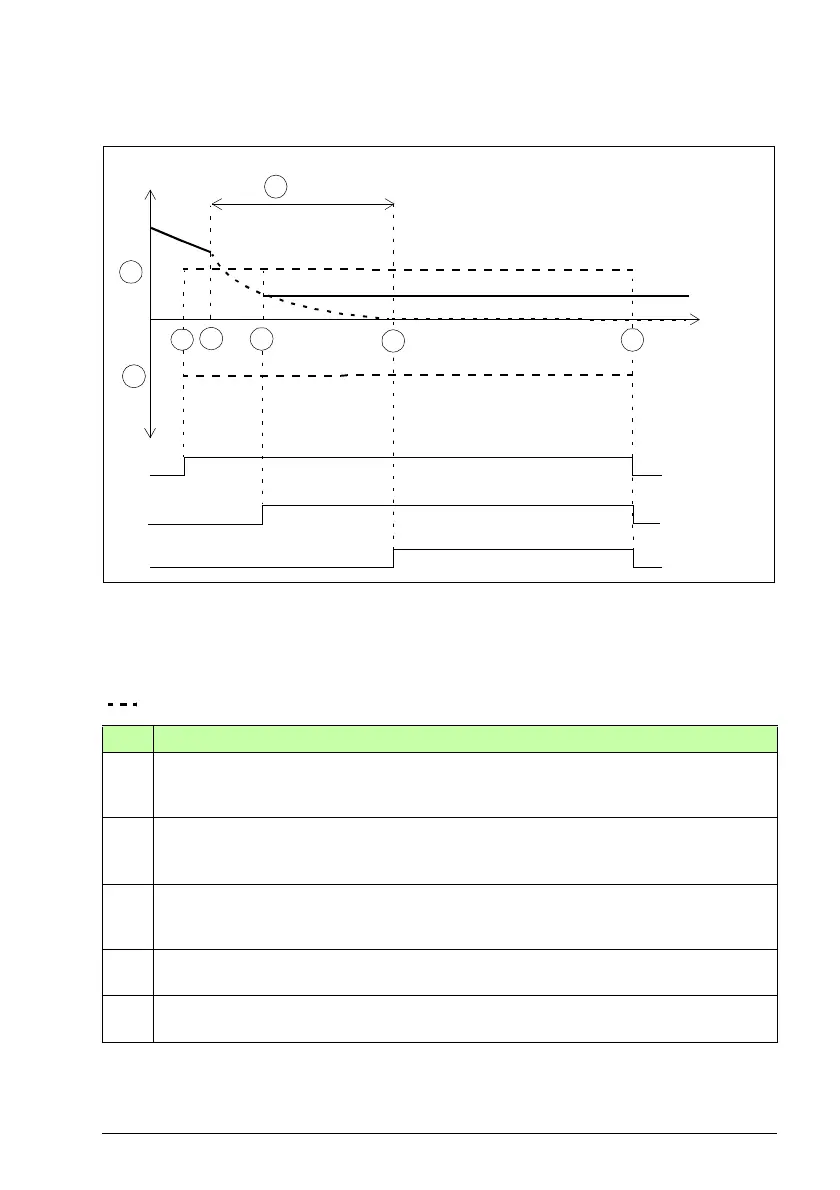
Case B: This applies when the drive stops modulating before the SSM monitoring
limit has been reached.
A SSM1 limit positive (parameter SSMx.13)
B SSM1 limit negative (parameter SSMx.12)
C Time to zero speed (parameter STO.14): When the drive stops modulating, SSM1
indication goes on after this delay.
SSM limits (A and B)
Step Description
1 The SSM1 request is received (for example, from the I/O) and the FSO starts the
SSM1 monitoring. The motor speed is not between the SSM1 limit positive (A) and
SSM1 limit positive (B). The SSM1 indication is off.
2 The drive stops modulating and the FSO starts a counter for time C. The motor speed
starts to decelerate. While the drive is not modulating, the state of the FSO outputs is
based on the latest speed information from modulation.
3a The drive starts to modulate again and the FSO receives the actual motor speed again.
The motor speed is between the SSM1 limit positive (A) and SSM1 limit positive (B),
and the SSM1 indication goes on.
3b Time C has elapsed, but the drive is still not modulating. The FSO assumes that the
motor has stopped.
4 The SSM1 request is removed and the FSO stops the SSM1 monitoring. The SSM1
indication goes off.
SSM1 state &
indication (3a)
SSM1 request
Motor speed
Time
A
1
B
2
4
3b
STO.14
C
3a
SSM1 state &
indication (3b)