ABB i-bus
®
KNX
Parameters
92 2CDC509086D0201 | ABA/S 1.2.1
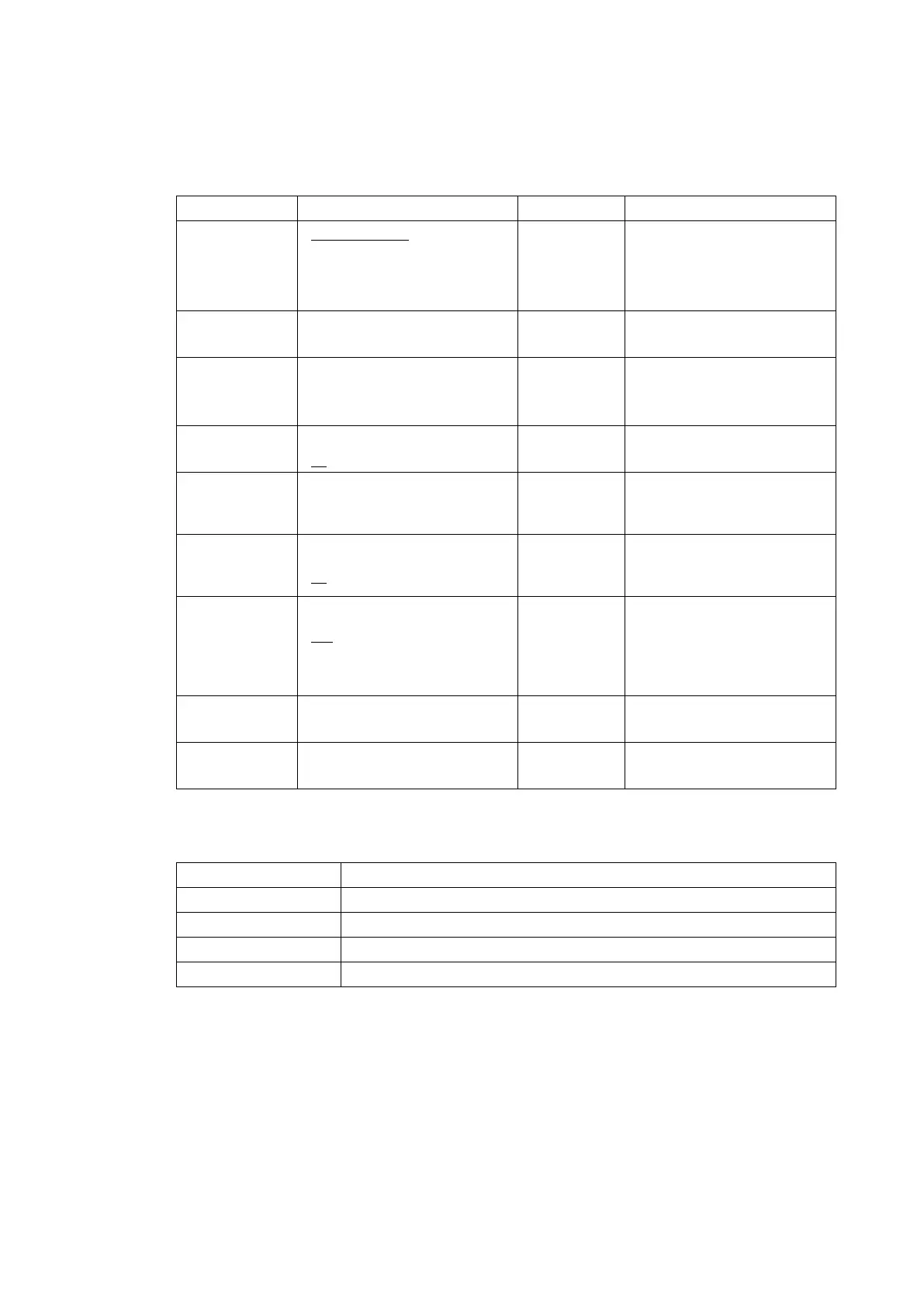
Parameters
Name Value Visible Description
Controller type
- Proportional (P)
- Integral (PI)
- Derivative (PD)
- PID
Always
Proportional
Coefficient
Float value,
default = 60
Always
Integral Time
Float value in [min],
default = 90,
0 not permitted
If Controller
type = PI or PD
Integral time in [s]; typical
range: 60...900 s
Integral Time as
input
- yes
- no
If Controller
type = PI or PD
Derivative Time
Float value in [s],
default = 1
If Controller
type = PD or
PID
Derivative time in [s]; typical
range: 1...10 s
Derivative Time
as input
- yes
- no
If Controller
type = PD or
PID
Limit output
value, anti-wind-
up
- yes
- no
Always
Limits the output value to a
range. If this range is exceeded,
a limit is imposed on the integral
value of the controller ("anti-
wind-up").
Lower limit Float value,
default = 0
Always
Upper limit Float value,
default = 255
Always
Description of parameters
Controller type:
Value Description
P (Proportional) Proportional controller. The integral and derivative coefficients are 0.
PI (Integral) Proportional integral controller. The derivative coefficient is 0.
PD (Derivative) Proportional derivative controller. The integral coefficient is 0.
PID Proportional integral derivative controller.
If the controller type is P (Proportional), the integral value and derivative value are always 0.

 Loading...
Loading...








