ABB i-bus
®
KNX
Parameters
ABA/S 1.2.1 | 2CDC509086D0201 91
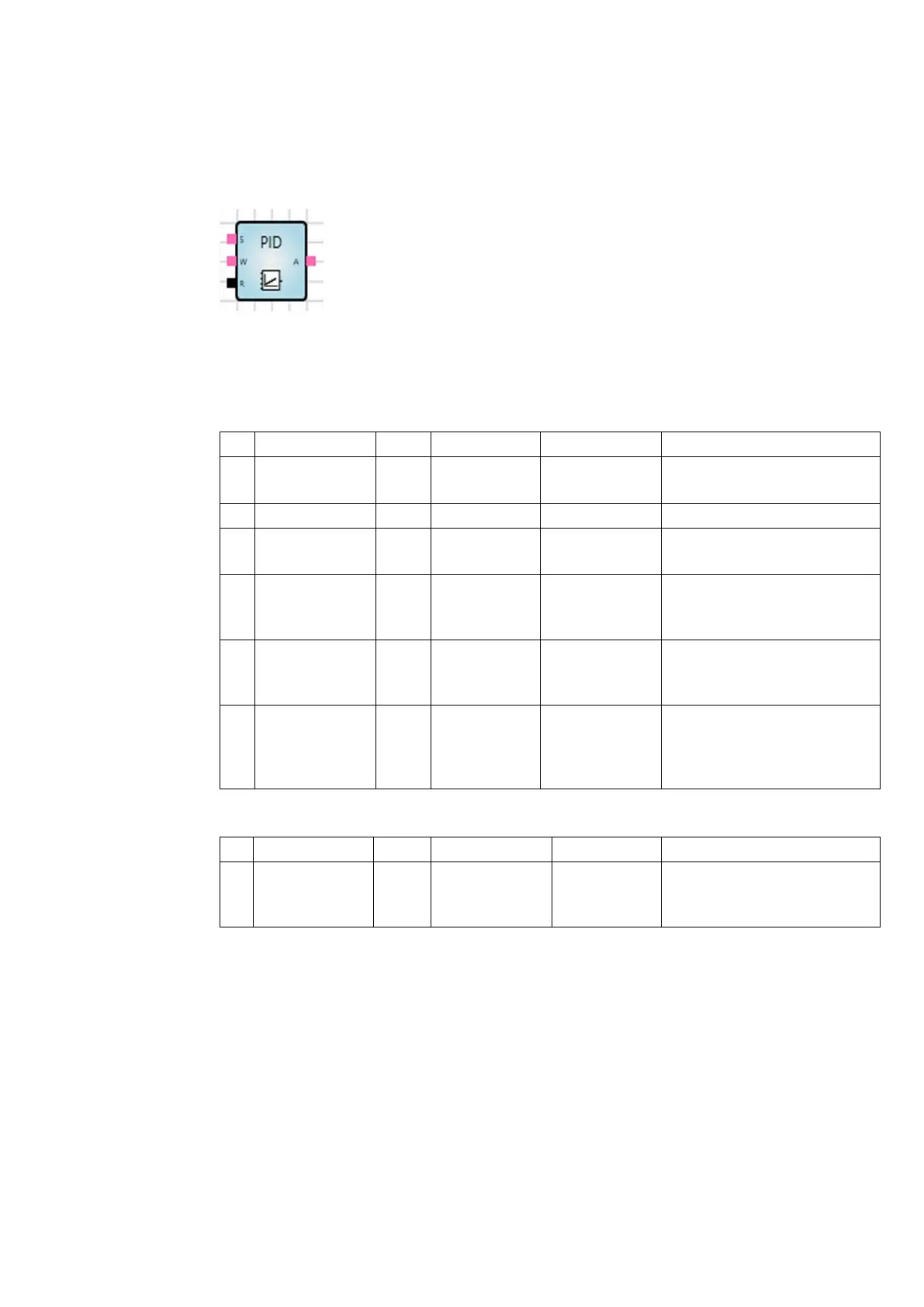
7.10.33 PID controller (PID)
Description
The controller calculates the output value from the difference between the Setpoint and the Actual Value.
The control parameters are Proportional Coefficient, Integral Time and Derivative Time.
Inputs
No. DPT Abbr. Name Visible Description
1
Numeric,
1 byte or higher
S
Setpoint Always
Target value of controller, e.g.
target room temperature
2 Same as Input 1 A Actual value Always Current measured value
3
Numeric,
1 byte or higher
PC
Proportional
Coefficient
Parametrizable Controller gain
4
Numeric,
1 byte or higher
IT Integral Time Parametrizable
Integral time in [s]; typical range:
60...900 s
C
i
= 1/Integral Time
5
Numeric,
1 byte or higher
DT Derivative Time Parametrizable
Derivative Time in [s]; typical
range: 1...10 s
C
d
= Derivative Time
6 1 bit R Reset Always
Triggers the integral value of the
controller.
As long as R = 0 the integral
value is set to 0.
Outputs
No. DPT Abbr. Name Visible Description
1
Numeric,
1 byte or higher
O Output Always
Control value, no unit.
Typically 1 byte unsigned
(0...255)
Room temperature control example:
The Setpoint and Actual Value are two temperatures. The output value is the control value of a valve
actuator.
 Loading...
Loading...









