NoteAction
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot work-
ing area.
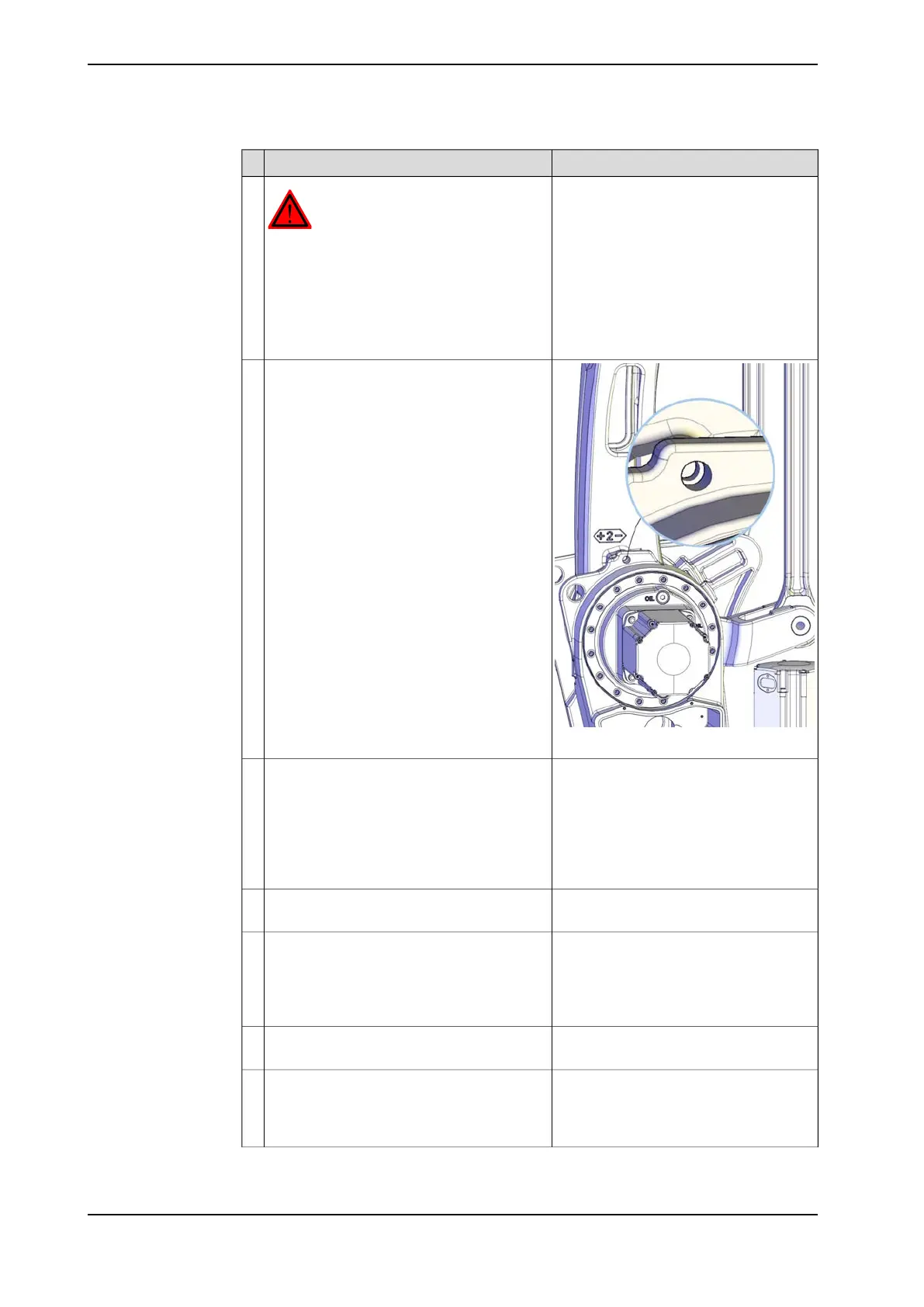
2
xx1000001179
Secure the lower arm with a lock screw
M16x90 in the hole as shown in the figure.
3
See sections:
• Replacing linkage - upper link arm
on page 225
• Replacing linkage - lower link arm
on page 233
• Replacing the linkage - link on
page 240
Remove the linkage starting with upper link
arm.
4
See section Replacing parallel rod on
page 257.
Remove the parallel rod.5
See sections:
• Replacing cable harness, lower
end (axes 1-3) on page 147
• Replacing the cable harness, upper
end (incl. axis 6) on page 157
Remove the cable harness in upper and lower
arms.
Secure the cable harness in a way that it is
protected from getting damaged and from oil
spill.
6
See section Replacing the upper arm on
page 209.
Remove the complete upper arm.7
See section Replacing motors, axes 2 and
3 on page 294.
Remove the cover on motors axes 2-3 and
disconnect the motor cables.
Motors are removed in order to be able to
rotate lower and parallel arms.
8
Continues on next page
270 Product manual - IRB 460
3HAC039842-001 Revision: P
© Copyright 2012-2018 ABB. All rights reserved.
4 Repair
4.4.9 Replacing the complete lower arm system
Continued

 Loading...
Loading...






