NoteAction
xx1000001166
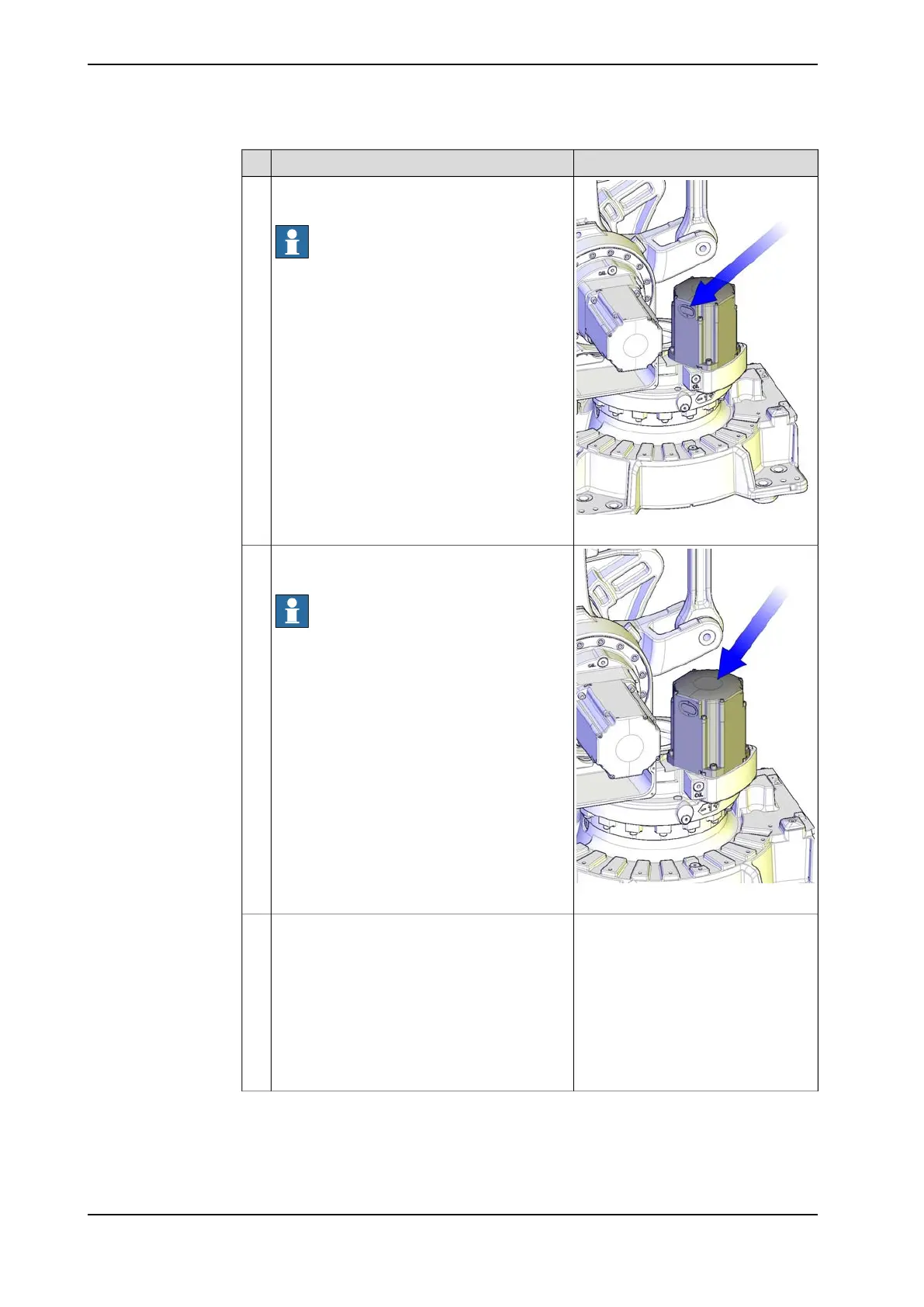
Refit the cable gland cover at the cable exit with
its attachment screws.
Note
Make sure the cover is tightly sealed!
Replace gasket if damaged.
8
xx1000001165
Refit the motor cover with its attachment
screws.
Note
Make sure the cover is tightly sealed!
9
Pendulum Calibration is described in
Operating manual - Calibration Pendu-
lum, enclosed with the calibration
tools.
Recalibrate the robot!10
Axis Calibration is described in Calib-
rating with Axis Calibration method on
page 357.
General calibration information is in-
cluded in section Calibration on
page 347.
Continues on next page
292 Product manual - IRB 460
3HAC039842-001 Revision: P
© Copyright 2012-2018 ABB. All rights reserved.
4 Repair
4.5.1 Replacing motor, axis 1
Continued

 Loading...
Loading...






