NoteAction
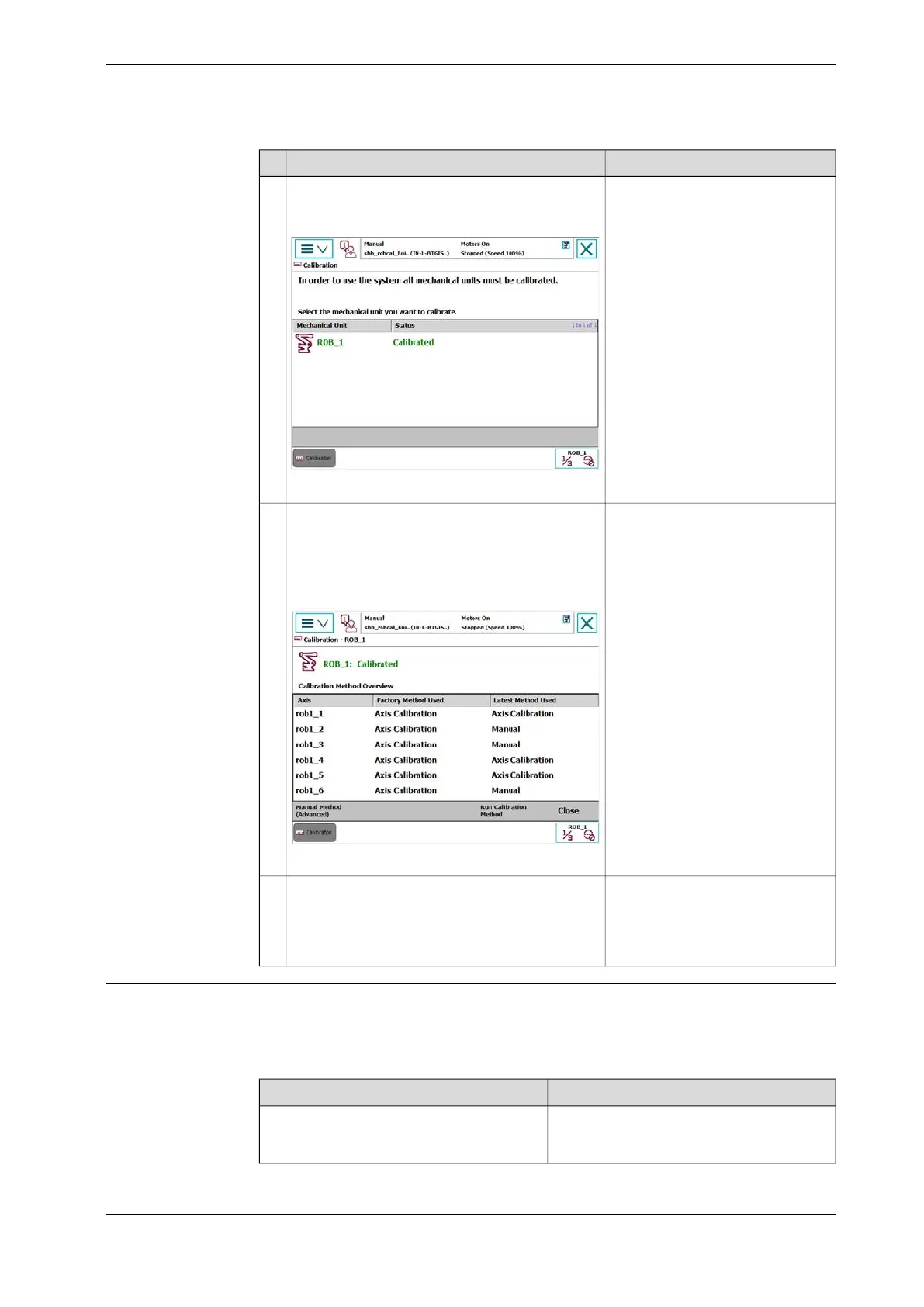
All mechanical units connected to the system are
shown with their calibration status.
2
Tap the mechanical unit in question.
xx1500000943
The FlexPendant will give all inform-
ation needed to proceed with Axis
Calibration.
Calibration method used at factory for each axis
is shown, as well as calibration method used for
the robot during last field calibration.
3
Tap Run Calibration Method. The software will
automatically call for the procedure for the valid
calibration method.
xx1500000944
A brief overview of the sequence
that will be run on the FlexPendant
is given in Overview of the calibra-
tion procedure on the FlexPendant
on page 363.
Follow the instructions given on the FlexPendant.4
Restarting an interrupted calibration procedure
If the Axis Calibration procedure is interrupted before the calibration is finished,
the RobotWare program needs to be started again. Use this procedure to take
required action.
ActionSituation
Press and hold the three-position enabling
device and press Play.
The three-position enabling device on the
FlexPendant has been released during robot
movement.
Continues on next page
Product manual - IRB 460 365
3HAC039842-001 Revision: P
© Copyright 2012-2018 ABB. All rights reserved.
5 Calibration
5.4.4 Axis Calibration - Running the calibration procedure
Continued

 Loading...
Loading...






