ActionSituation
Remove the calibration tool, if it is installed,
and restart the calibration procedure from
the beginning. See Starting the calibration
procedure on page 364.
The RobotWare program is terminated with
PP to Main.
If the calibration tool is in contact the robot
axis needs to be jogged in order to release
the calibration tool. Jogging the axis in wrong
direction will cause the calibration tool to
break. Directions of axis movement is shown
in Calibration movement directions for all
axes on page 352
After calibration
NoteAction
xx1600002102
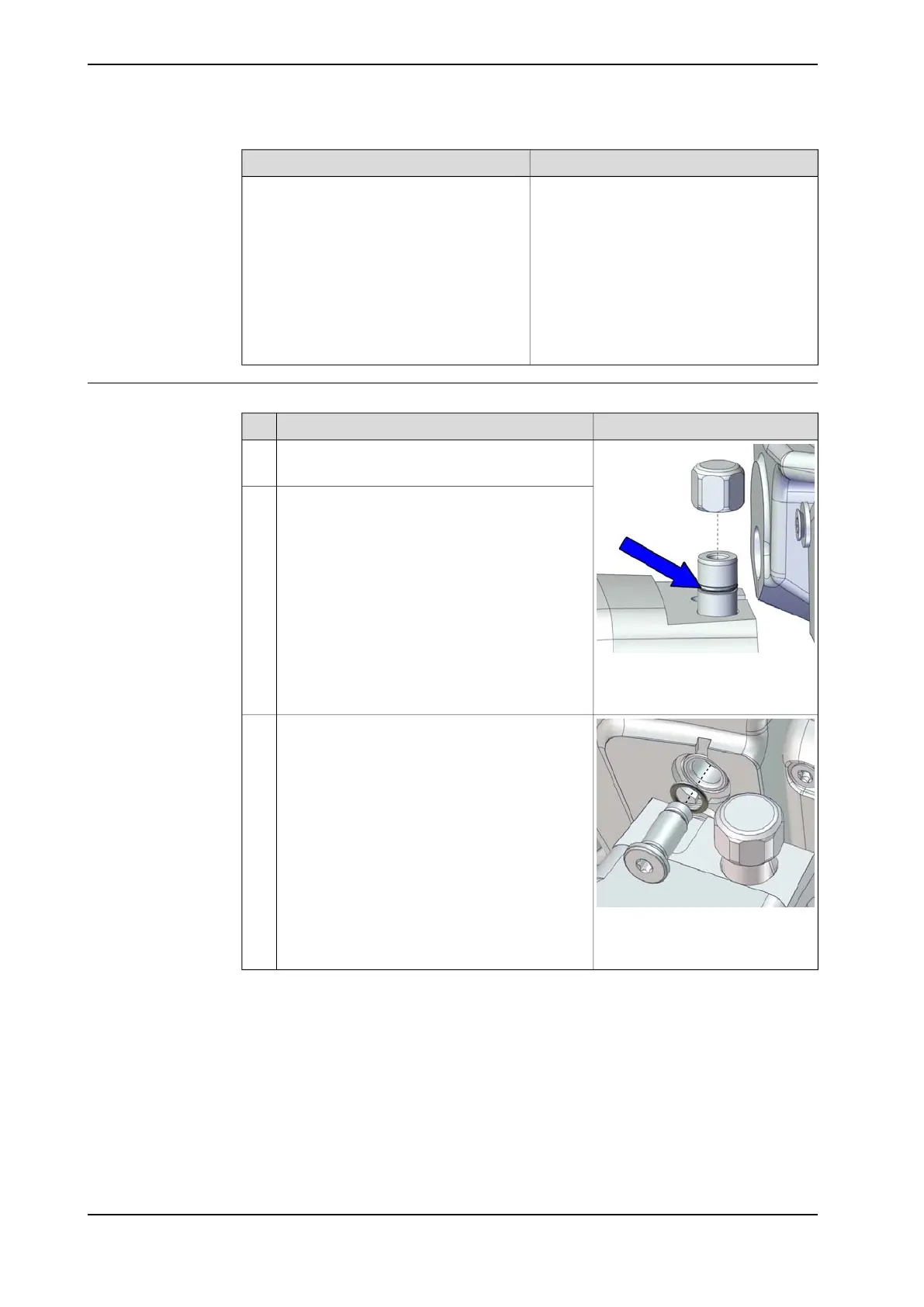
Check the o-ring on the fixed calibration pin.
Replace if damaged or missing.
1
Reinstall the protective cover on the fixed calibra-
tion pin on each axis, directly after the axis has
been calibrated.
Replace the cover with new spare part, if missing
or damaged.
2
Protection cover and plug set:
3HAC059487-001.
xx1500000952
Reinstall the protective plug and sealing in the
bushing on each axis, directly after the axis has
been calibrated. Ensure that the sealing is not
damaged.
Replace the plug and the sealing with new spare
part, if missing or damaged.
3
Protection cover and plug set:
3HAC059487-001.
366 Product manual - IRB 460
3HAC039842-001 Revision: P
© Copyright 2012-2018 ABB. All rights reserved.
5 Calibration
5.4.4 Axis Calibration - Running the calibration procedure
Continued

 Loading...
Loading...






