LevelNoteArticle numberSpare part
L2IRB 6710-210/2.65
IRB 6710-175/2.65 LID
3HAC083039-001
(CH31)
Cable harness
L2IRB 6710-200/2.95
IRB 6710-175/2.95 LID
3HAC078462-001
(CH31-L)
Cable harness
Required tools and equipment
NoteArticle numberEquipment
Content is defined in section
Standard toolkit on page 628.
-Standard toolkit
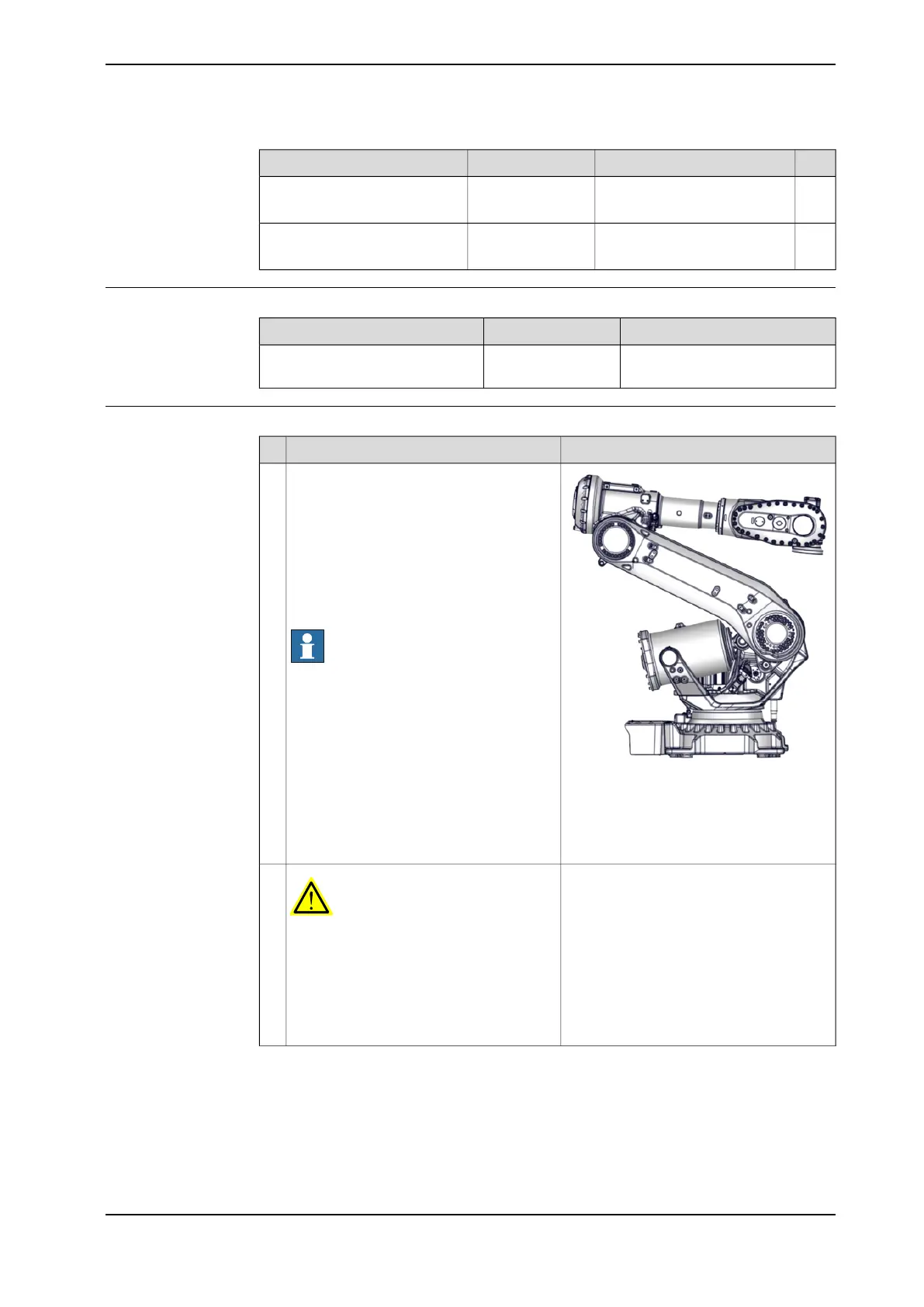
Preparations before removing the cable harness
NoteAction
xx2200001615
Floor-standing robot:
Jog the robot to the specified position:
• Axis 1: 0°
• Axis 2: -60°
• Axis 3: +60°
• Axis 4: 0°
• Axis 5: +90°
• Axis 6: No significance.
Note
The specified position is a recommended
position.
Orient axis-5 as close as possible to +90°
to be able to open the axis-6 motor cover
and to remove the axis-6 motor cables. The
axis-5 position is also important to avoid
the spiral of the cable harness in the carrier
being unwound or placed in wrong position.
Depending on what tool is used, the other
axes may need to be jogged to another
position.
1
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the safe-
guarded space.
2
Continues on next page
Product manual - IRB 6710 287
3HAC085695-001 Revision: A
© Copyright 2023 ABB. All rights reserved.
5 Repair
5.6.1 Removing the cable harness
Continued