Geometries with orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 119
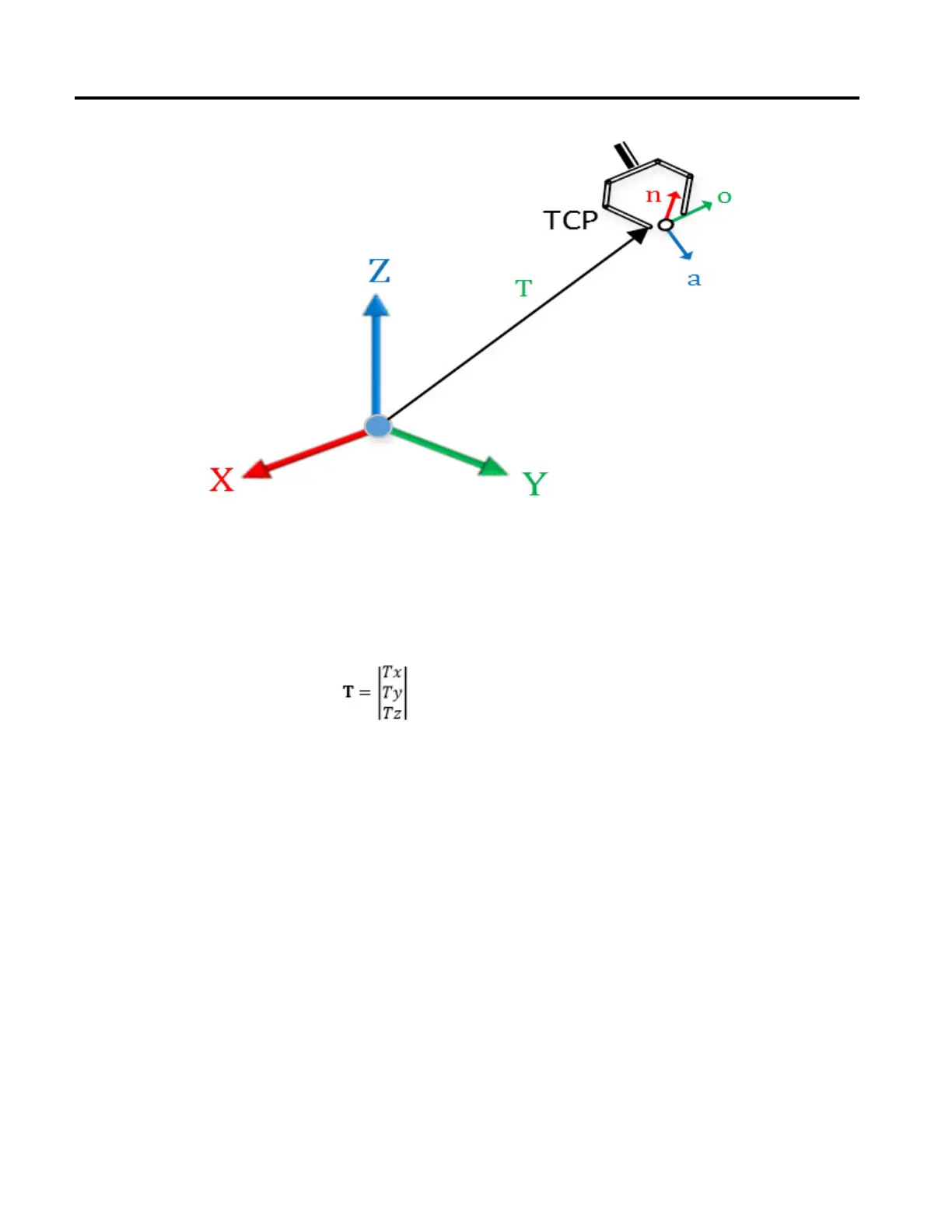
Translation Specification of Point
The translation specifies the position vector of the point as discussed above with
three components X,Y,Z.
Rotation Specification of Point - n,o,a
The orientation specifies the orientation of the point specified by three vectors as
shown in the figure above. The approach vector a specifies how the object is
approached by the robot’s end effector as shown in the figure above. The
orientation vector o specifies orientation of the end effector fingertip to fingertip
when approaching the object as shown in the figure above. The final vector,
known as the normal vector n is a vector normal to the plane formed by approach
and orientation vectors. The n vector is X in the robot wrist coordinate system,
the o vector is Y, and the a vector is Z.
 Loading...
Loading...

