Geometries with orientation support
120 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
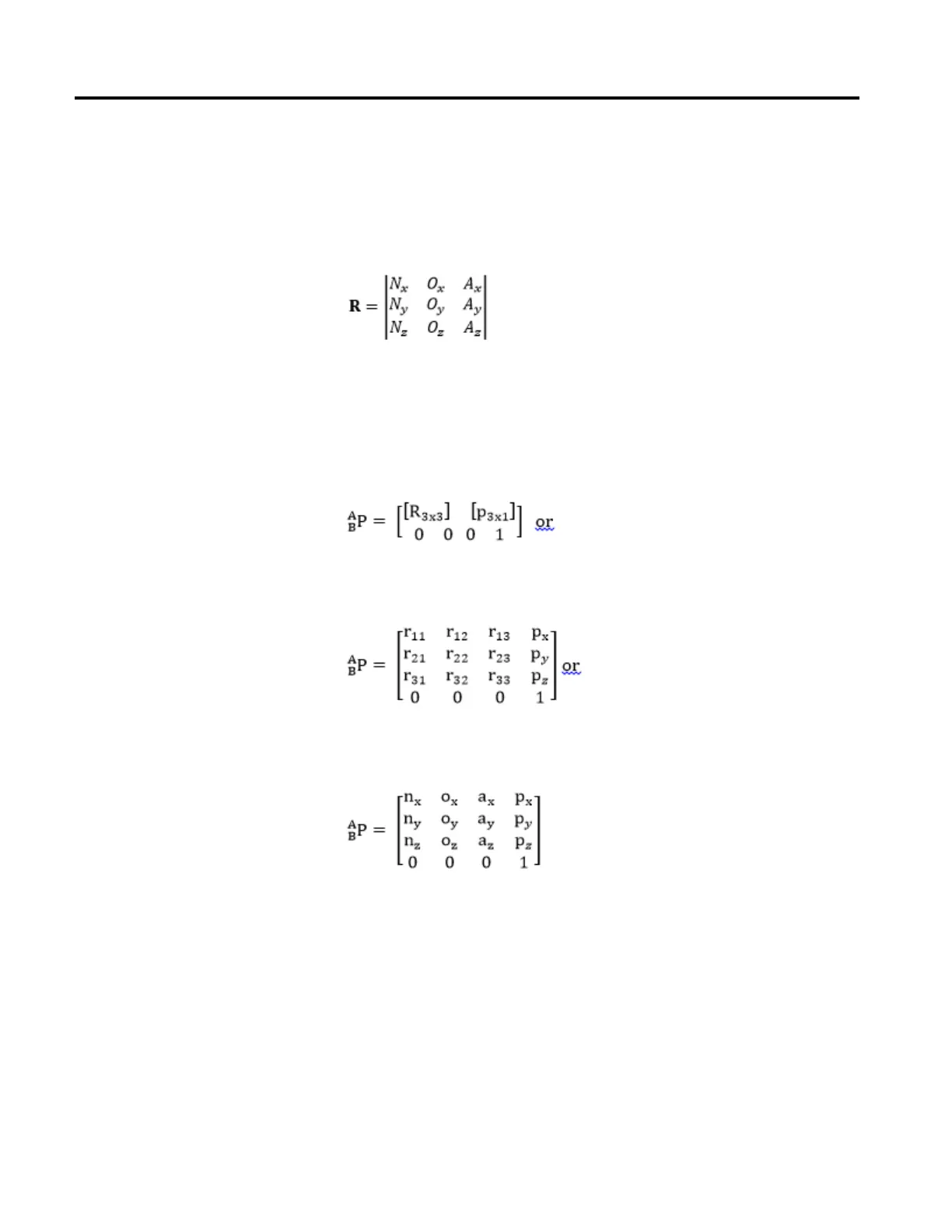
The three 3 by 1 vectors n o a form a 3 by 3 Rotation matrix which defines the
rotated frame with respect to the base frame of the robot. The vectors n o a are
unit vectors with respect to the base coordinate system. The columns of the
rotation matrix n o a represent the direction cosines of the rotated orientation
frame with respect to the base coordinate system.
Translation Specification of Point - n,o,a,t
The translation and rotation specifications are combined to form a 4 by 4
transform matrix with elements from translation and orientation specification as
shown below which completely specify the position and orientation of a point.
 Loading...
Loading...

