Geometries with orientation support
140 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
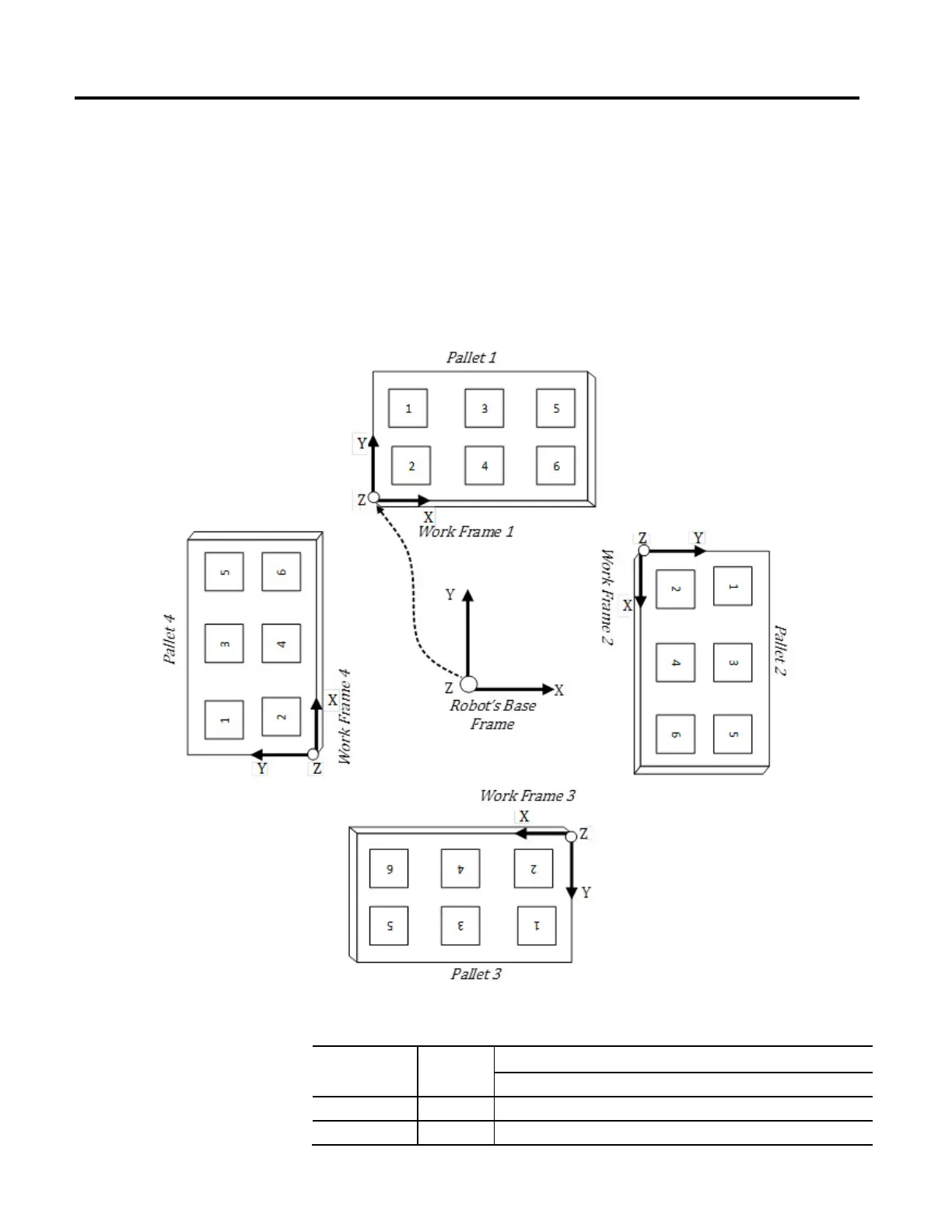
This diagram illustrates multiple work frames for one robot base frame. The robot
is picking six boxes from the Pallet 1 and the positions of all boxes are measured
from the Pallet 1. The same pick and place program is used for the other pallets
placed at different positions and orientations. Use the MCTO instruction with
different work frame offset values and run the same program. The MCTO
instruction re-computes the new target positions based on the different work
frame offset inputs. For example, the Position of Box-1 is same for all four pallets,
but the robot places at different positions and orientations from the robot base
frame.
Work Frames Work ID
Work Frame Offsets
X Y Z Rx Ry Rz
Work Frame 1 0 -50 100 -800 0 0 0
Work Frame 2 1 100 50 -800 0 0 -90
 Loading...
Loading...

