POS MV V4 User Guide
Introduction
Copyright © Applanix Corporation, 2009
1-10
difference in mounting angles between the transducer, the IMU, the vessel
and your chosen reference frame.
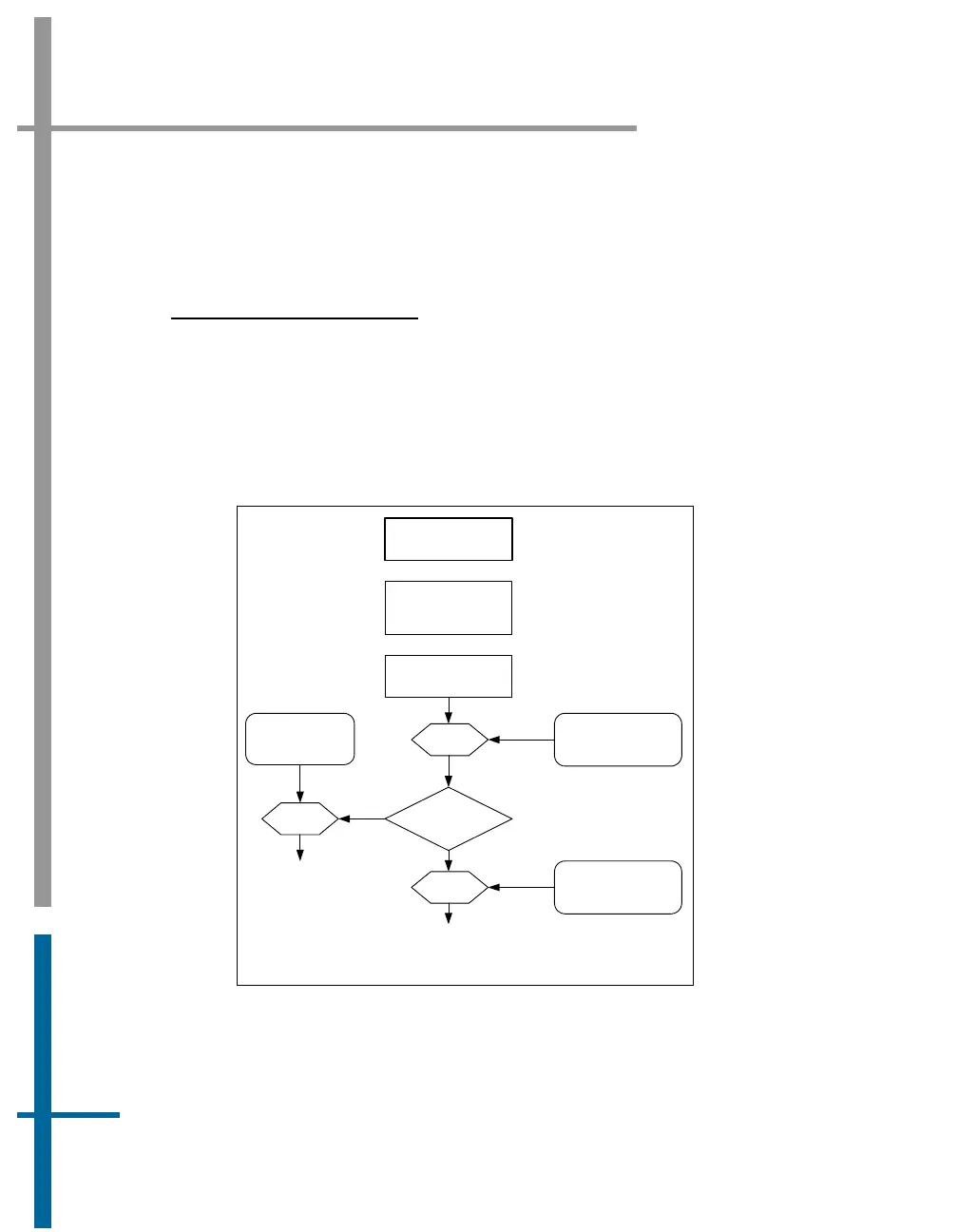
Operation without GAMS
Figure 2 and the following paragraphs describe how POS MV computes
heading without GAMS.
After power-on, and the initialization and self-test routines have finished, the
IMU performs a levelling routine to establish a locally level reference frame.
This occurs rapidly and usually finishes within 30 seconds.
POS MV without
GAMS heading aiding
Up to 30 minutes
to complete
POS MV power-on
Rotation
IMU wrt reference
frame mounting
angles
IMU begins levelling
and heading
alignment
Heading
information
Rotation
Rotation
Ship frame wrt
reference frame
mounting angles
Sensor 1 (Sonar) wrt
reference frame
mounting angles
Vessel heading
accuracy = 0.2 to 2
degrees
Sonar heading
accuracy = 0.2 to 2
degrees
Figure 2: Heading Measurement without GAMS
Following its levelling routine, the IMU begins to align itself to true north. This
process, called gyrocompassing, occurs much more slowly and can take from