6 Parameter Settings and Functions
© Copyright Reserved Autonics Co., Ltd. 85
6.6.2 Run/Stop
Users may run or stop control output by force while in Run mode.
The STOP command stops the control output. Alarm output, other than control output,
maintains the values as set in the alarm output setting at the point of STOP.
This feature can be enabled by configuring parameters. The digital input terminals
(DI-1 and DI-2) can be assigned to the run/stop feature.
Modifications on RUN/STOP are allowed even when in open
state. The STOP status will remain in effect after shutting down
the controller and powering it back on.
When STOP is in effect, MV based on the control output at the
point of STOP (Stop.MV) is displayed, and continues to be
displayed even if a sensor break occurs.
When restarting after STOP, the initial MV is the MV at the end
point.
The run/stop setting remains in effect after turning power back
on.
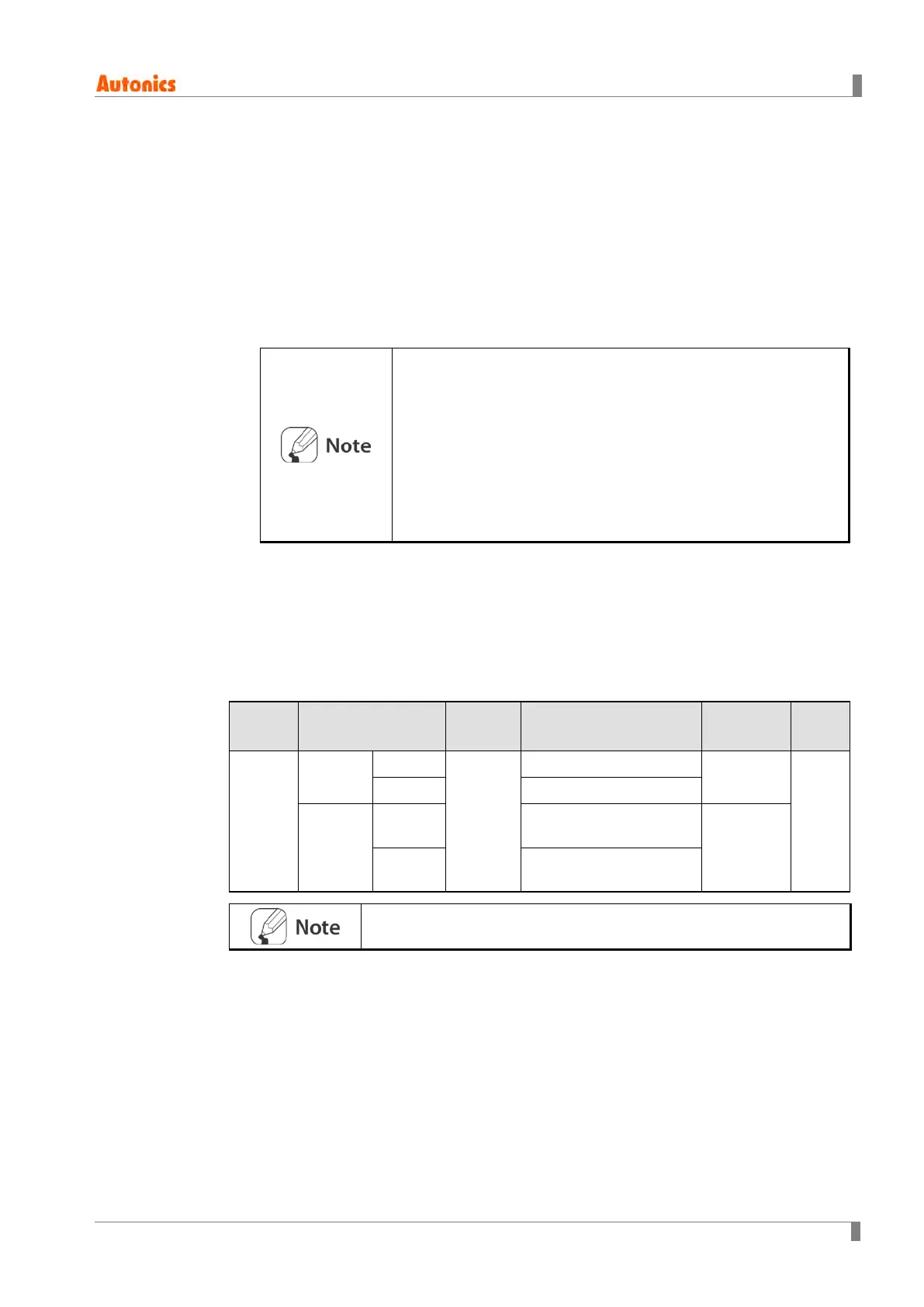
6.6.2.1 Control Output Upon STOP
This sets the control output value upon a STOP. With ON/OFF control, select between 0.0
(OFF) and 100.0 (ON). In PID control, you can directly choose MV within a range of 0.0 to
100.0.
Group
Preceding
Condition
Parame
ter
Range
Factory
Default
Unit
Control
Setting
Group
Heating,
Cooling
PID
Stop MV
0.0 ~ 100.0
0.0
%
ON/OFF 0.0 (OFF)/100.0 (ON)
Heating
and
Cooling
PID
-100.0 (Cool) to 100.0
(Heat)
0.0
ON/OFF
-100.0 (Cool ON)/0.0
(OFF)/100.0 (Heat ON)
When set to STOP, the preset MV is used for output ignoring the MVs
from ON/OFF control and PID control.
 Loading...
Loading...





