ROBOT GENERAL DESCRIPTION
13
Comau Robotics Product Instruction
C
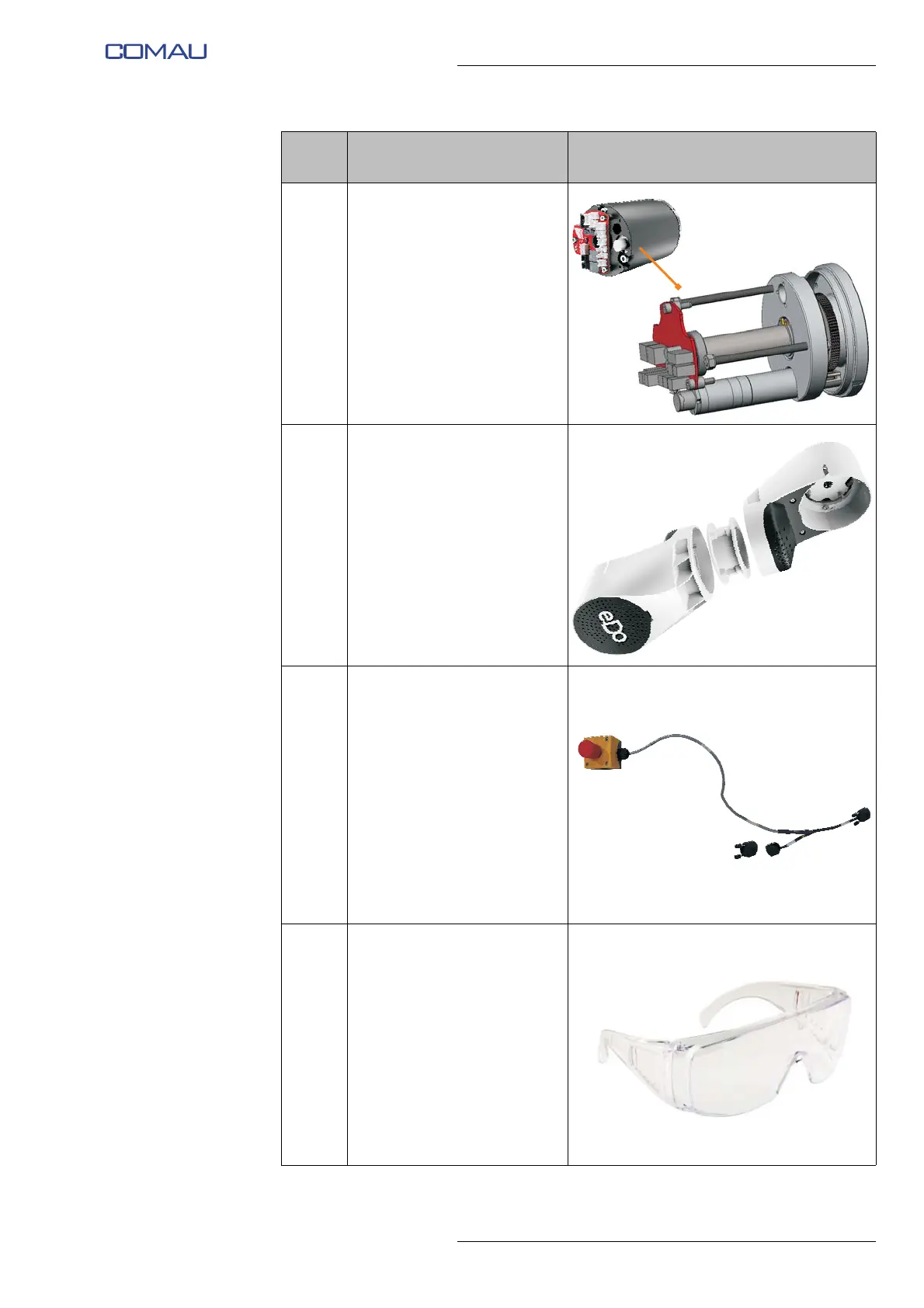
Small joint
Unit consisting of joint board
(for motor control), motor,
encoder, gearbox, main shaft,
support plate, gears and
output flange.
The small joint constitutes the
remaining 3 axes of the Robot
(Ax. 4, Ax. 5 and Ax. 6).
D
Brackets and adapters
Assembly composed of
brackets and adapters, used
for physical connection
between the various joints.
E
Remote emergency
push-button
An additional emergency
push-button is available to be
positioned freely near the
Robot.
The cap connector to be used
in case of absence of
additional emergency
push-buttons and/or
interlocking devices
associated with guards is also
available.
F
Protective glasses
Protective equipment to wear
during the use of the Robot.
Ref.
Fig. 2.2
Name and description Image