Comau Robotics Product Instruction
12
ROBOT GENERAL DESCRIPTION
2.2 Description of the main parts that make up the
Robot
The Robot is characterized by a modular composition, obtained by assembling and
connecting the “smallest construction units” described below.
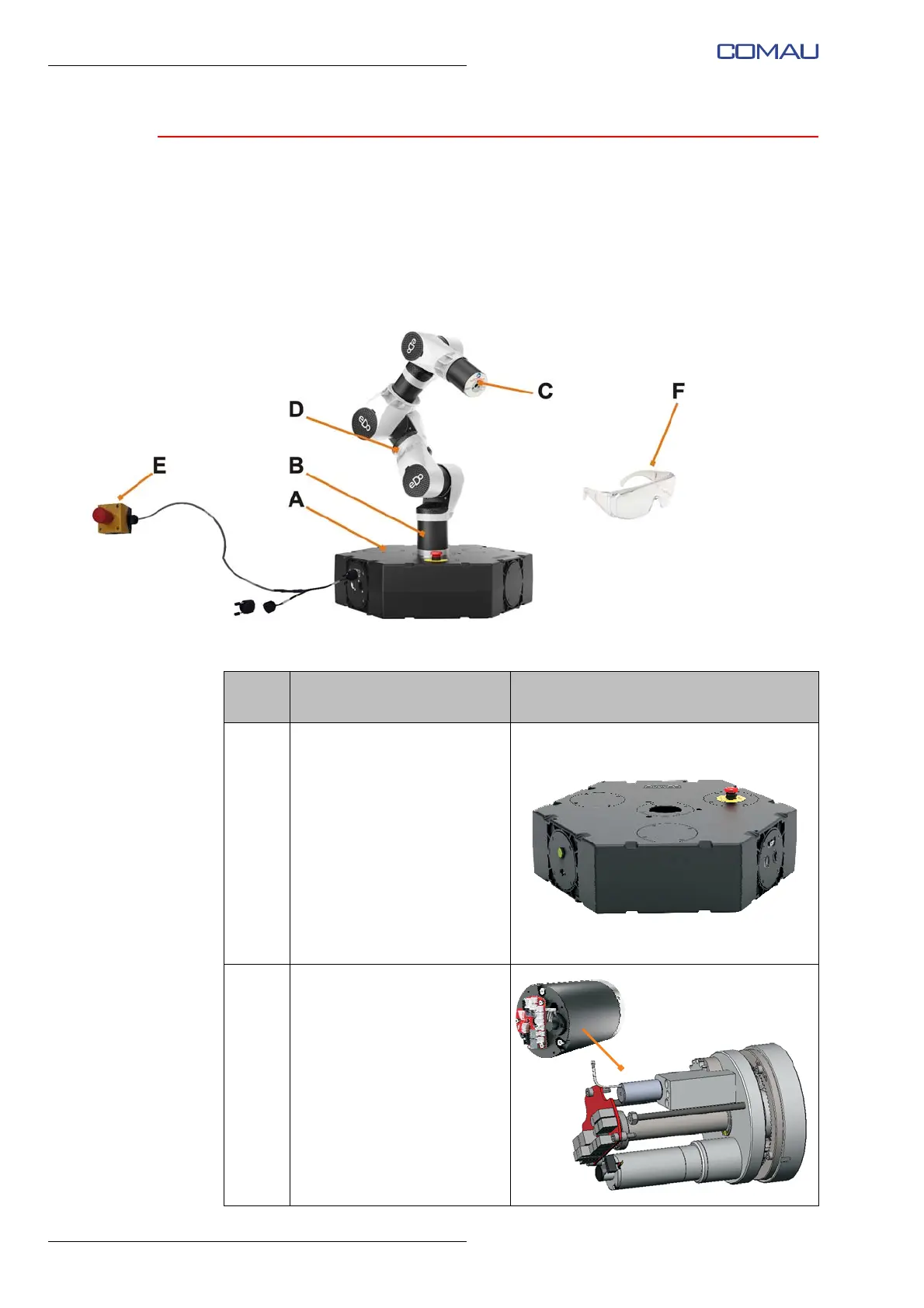
Fig. 2.2 - Identification of e.DO components
Tab. 2.1 - Description of the e.DO components
Ref.
Fig. 2.2
Name and description Image
A
Robot base
Robot basic structure
equipped with interface
devices (switch, buttons,
connectors) inside which the
Robot main power supply and
controller boards are installed.
B
Big joint
Unit consisting of joint board
(for motor control), motor,
encoder, gearbox, brake,
main shaft, support plate,
gears and output flange.
The big joint constitutes the
first 3 axes of the Robot (Ax.
1, Ax. 2 and Ax. 3).