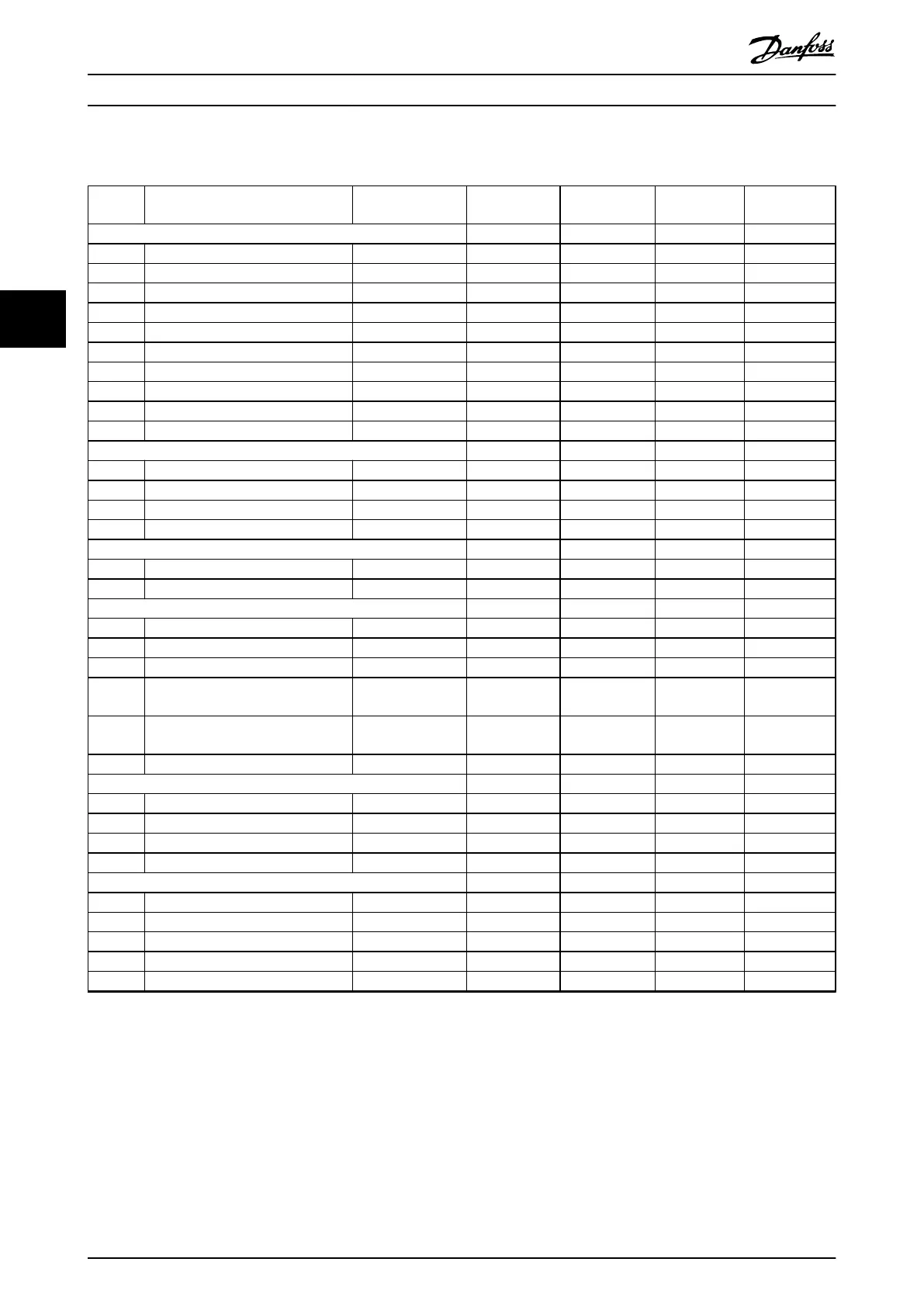
4.1.17 20-** Drive Closed Loop
Param-
eter #
Parameter description Default value 4 set-up Change during
operation
Conversion
index
Type
20-0* Feedback
20-00 Feedback 1 Source [2] Analog Input 54 All set-ups TRUE - Uint8
20-01 Feedback 1 Conversion [0] Linear All set-ups FALSE - Uint8
20-02 Feedback 1 Source Unit ExpressionLimit All set-ups TRUE - Uint8
20-03 Feedback 2 Source [0] No function All set-ups TRUE - Uint8
20-04 Feedback 2 Conversion [0] Linear All set-ups FALSE - Uint8
20-05 Feedback 2 Source Unit ExpressionLimit All set-ups TRUE - Uint8
20-06 Feedback 3 Source [0] No function All set-ups TRUE - Uint8
20-07 Feedback 3 Conversion [0] Linear All set-ups FALSE - Uint8
20-08 Feedback 3 Source Unit ExpressionLimit All set-ups TRUE - Uint8
20-12 Reference/Feedback Unit ExpressionLimit All set-ups TRUE - Uint8
20-2* Feedback/Setpoint
20-20 Feedback Function [4] Maximum All set-ups TRUE - Uint8
20-21 Setpoint 1 0 ProcessCtrlUnit All set-ups TRUE -3 Int32
20-22 Setpoint 2 0 ProcessCtrlUnit All set-ups TRUE -3 Int32
20-23 Setpoint 3 0 ProcessCtrlUnit All set-ups TRUE -3 Int32
20-6* Sensorless
20-60 Sensorless Unit ExpressionLimit All set-ups TRUE - Uint8
20-69 Sensorless Information 0 N/A All set-ups TRUE 0 VisStr[25]
20-7* PID Autotuning
20-70 Closed Loop Type [0] Auto 2 set-ups TRUE - Uint8
20-71 PID Performance [0] Normal 2 set-ups TRUE - Uint8
20-72 PID Output Change 0.10 N/A 2 set-ups TRUE -2 Uint16
20-73 Minimum Feedback Level
-999999
ProcessCtrlUnit 2 set-ups TRUE -3 Int32
20-74 Maximum Feedback Level
999999
ProcessCtrlUnit 2 set-ups TRUE -3 Int32
20-79 PID Autotuning [0] Disabled All set-ups TRUE - Uint8
20-8* PID Basic Settings
20-81 PID Normal/ Inverse Control [0] Normal All set-ups TRUE - Uint8
20-82 PID Start Speed [RPM] ExpressionLimit All set-ups TRUE 67 Uint16
20-83 PID Start Speed [Hz] ExpressionLimit All set-ups TRUE -1 Uint16
20-84 On Reference Bandwidth 5% All set-ups TRUE 0 Uint8
20-9* PID Controller
20-91 PID Anti Windup [1] On All set-ups TRUE - Uint8
20-93 PID Proportional Gain 2 N/A All set-ups TRUE -2 Uint16
20-94 PID Integral Time 8 s All set-ups TRUE -2 Uint32
20-95 PID Dierentiation Time 0 s All set-ups TRUE -2 Uint16
20-96 PID Di. Gain Limit 5 N/A All set-ups TRUE -1 Uint16
Parameter Lists
VLT
®
AQUA Drive FC 202
270 Danfoss A/S © 05/2018 All rights reserved. MG20OB02
44

 Loading...
Loading...


















