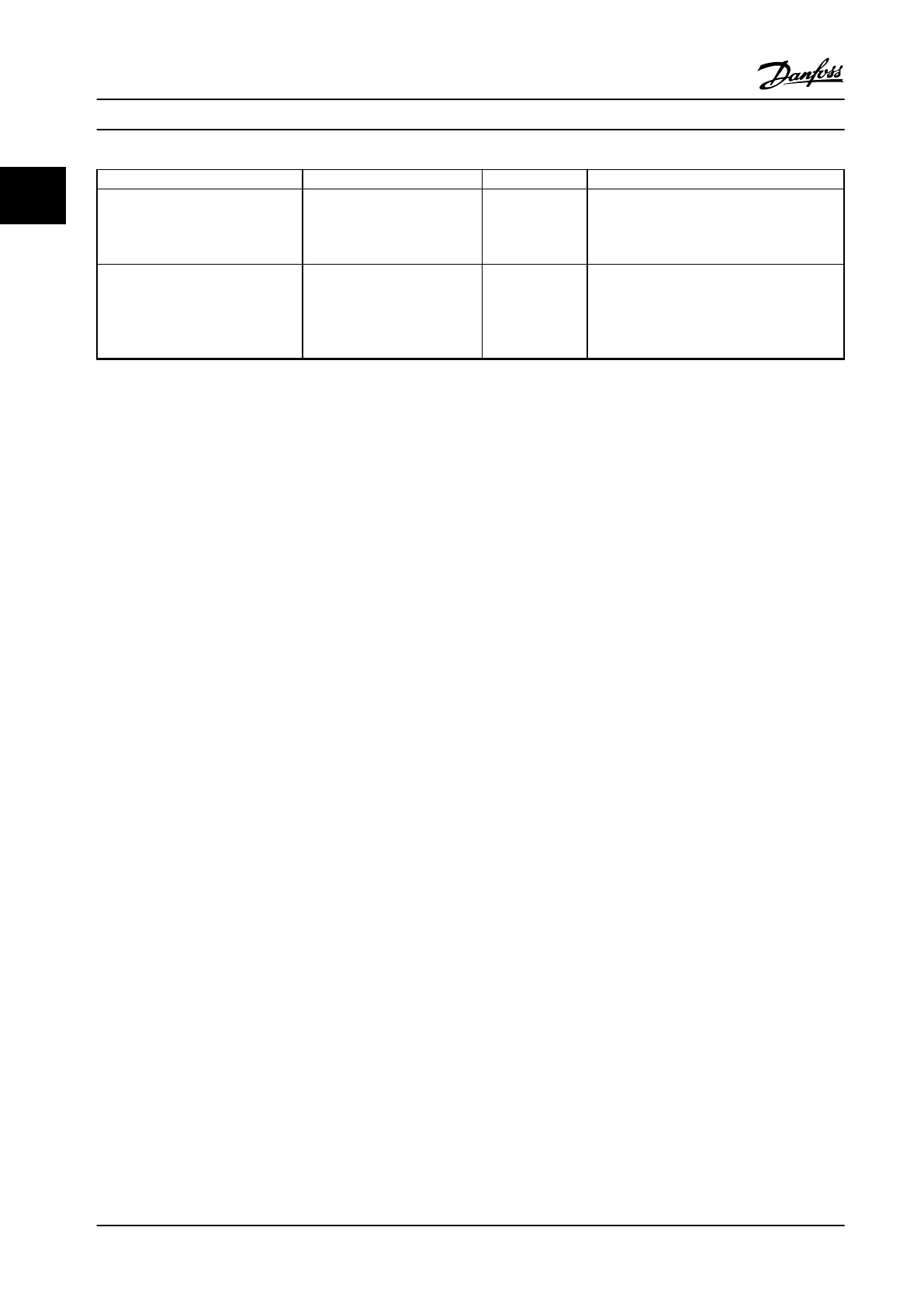
Parameter Range Default Function
20-93 PI Proportional Gain 0–10 0.01 Enter the process controller proportional gain.
Quick control is obtained at high amplifi-
cation. However, if amplification is too great,
the process may become unstable.
20-94 PI Integral Time 0.1–999.0 s 999.0 s Enter the process controller integral time.
Obtain quick control through a short integral
time, though if the integral time is too short,
the process becomes unstable. An excessively
long integral time disables the integral action.
Table 2.8 Closed-loop Set-up Wizard
2.7.9
Tuning the Drive Closed-loop Controller
Once the adjustable frequency drive's closed-loop controller has been set up, the performance of the controller should be
tested. In many cases, its performance may be acceptable using the default values of 20-93 PI Proportional Gain and 20-94 PI
Integral Time. However, in some cases it may be helpful to optimize these parameter values to provide faster system
response while still controlling speed overshoot.
2.7.10
Manual PI Adjustment
1. Start the motor.
2.
Set 20-93 PI Proportional Gain to 0.3 and increase it until the feedback signal begins to oscillate. If necessary, start
and stop the adjustable frequency drive or make step changes in the setpoint reference to attempt to cause
oscillation. Next reduce the PI proportional gain until the feedback signal stabilizes. Then reduce the proportional
gain by 40–60%.
3.
Set 20-94 PI Integral Time to 20 s and reduce it until the feedback signal begins to oscillate. If necessary, start and
stop the adjustable frequency drive or make step changes in the setpoint reference to attempt to cause oscillation.
Next, increase the PI integral time until the feedback signal stabilizes. Then increase of the integral time by 15–
50%.
Product Overview Design Guide
34 Danfoss A/S © Rev. 2014-01-14 All rights reserved. MG18C522
22

 Loading...
Loading...











