Chapter 10 Motion Control Function
1
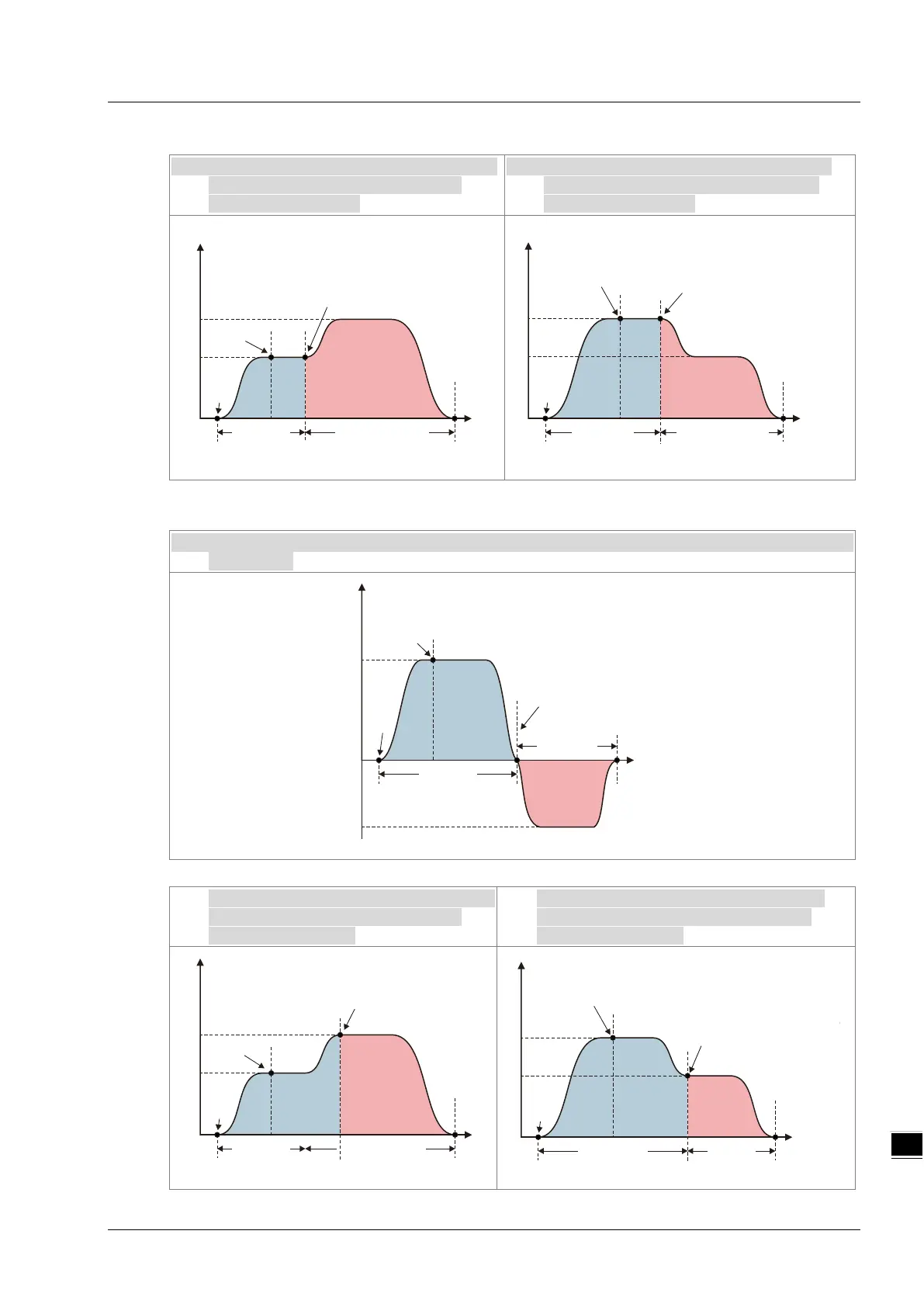
Blending with previous velocity: Buffermode=mcBlendingPrevious. See three cases as below.
1. When the target velocity of the current
instruction is less than that of the
2. When the target velocity of the current
instruction is greater than that of the
3. When the velocity direction of the current instruction is opposite to that of the buffered
instruction.
Blending with next velocity: Buffermode=mcBlendingNext. See three cases as below.
1. When the target velocity of the current
instruction is less than that of the
2. When the target velocity of the current
instruction is greater than that of the
t
Buffered instruction
V
Current
instruction
is started
Current
instruction
The buffered
instruction
is started
The buffer ed instruction starts to contr ol the axis
when curr ent instruction execution is completed and
the axis velocity is that of the previous instruction.
V
2
V
1
S1
S2
t
Buffered instruction
V
Current
instruction
is started
Current
instruction
The buffered
instruction
is star ted
The buffered instruction starts to control the axi s
when cur rent instruction execution is completed and
the axis velocity i s that of the pr evious i nstruction.
V
1
V
2
S1
S2
t
Buffered instruction
V
Current
instruction
is started
Current
instruction
The buffer ed
instruction
is started
The motion directions of current instruction
and buffered i nstruction are opposite.
The buffered instruction starts to control
the axis w hen current instruction
deceler ates til l the velocity i s 0.
V
1
V
2
S1
S2
t
Buffered instruction
V
Current
instruction
is started
Current
instructi on
The buffered
instruction
is started
Cur rent instruction execution is completed
and the buffered instruction starts to control th
axis when the axis velocity is decreased to the
veloci ty o f the next instruction.
V
1
V
2
S1
S2
t
Buffered instruction
V
Current
instruction
is started
Current
instruction
The buffered
instruction
is started
Current instruction execution is completed
and the buffered instr uction starts to control t
axi s when the axis accelerates to the velocit
of the next i nstruction.
V
2
V
1
S1
S2
10-9