Chapter 10 Motion Control Function
1
Vel _BM =mcBuffered
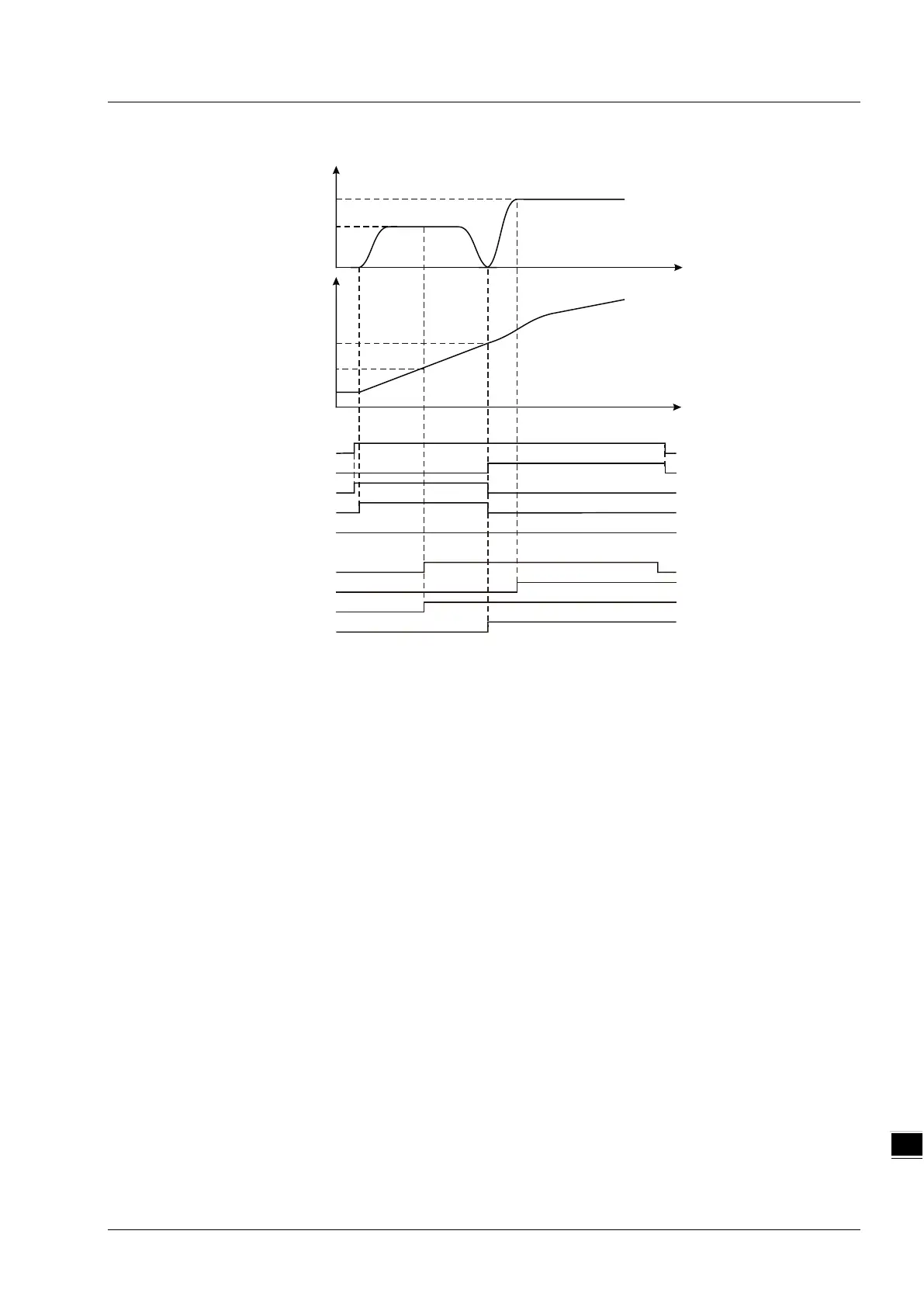
As Rel_Ex changes from FALSE to TRUE, Rel_Bsy changes to TRUE. One period later,
Rel_Act changes to TRUE. When the target position is not reached, Vel_Ex changes from
FALSE to TRUE. The axis decelerates to 0 when the execution of the MC_MoveRelative
instruction is completed. Then Rel_Done changes to TRUE, Rel_Bsy and Rel_Act change to
FALSE and the axis moves at the velocity and acceleration specified by the velocity instruction.
Vel_Bsy changes to TRUE and one period later, Vel_Act changes to TRUE. Rel_Invel changes
to TRUE as the target velocity is reached.
Rel_Vel
S
2
S
1
Vel_Vel
Rel_Ex
Rel_Done
Rel_Bsy
Rel_Act
Rel_Abt
Velocity
Position
Time
Time
Rel
Ve l_Ex
Vel_Bsy
Vel_Act
Vel_Invel
Vel
Rel_Dist
10-27