February 2019
User Instructions
MAN-02-04-60-0350-EN Rev. 3
49
Section 7: Parameter Menu
Parameter Menu
CAUTION: NOTE SET TORQUE AND POSITION
When using the point torque-dependent OPEN or torque-dependent CLOSED (see Section
7.1, Menu P1.3 u. P1.4) the actuator will only be open or closed when the set torque and
the associated end position is reached. If the end position is not reached, a torque error is
reported (see Section 6.2.2)
7.10 Parameter Group: Position Output (option)
Position output is used to indicate the current position of the actuator using 0/4-20 mA; it
can retrotted using software code.
If this option is not enabled, the menu point shows the message "inactive".
No adjustment to the end positions or the travel is required. Adjustment is automatically
performed during the conguration of travel limit positions (see Section 7.1)
No further settings are necessary for torque-dependent switch off, because the controller
exclusively uses travel limit posi- tions for the calculation. Regardless of whether this is
dened by the torque or the travel limit positions.
The factory default setting is:
4mA at 0% position 20mA at 100% position
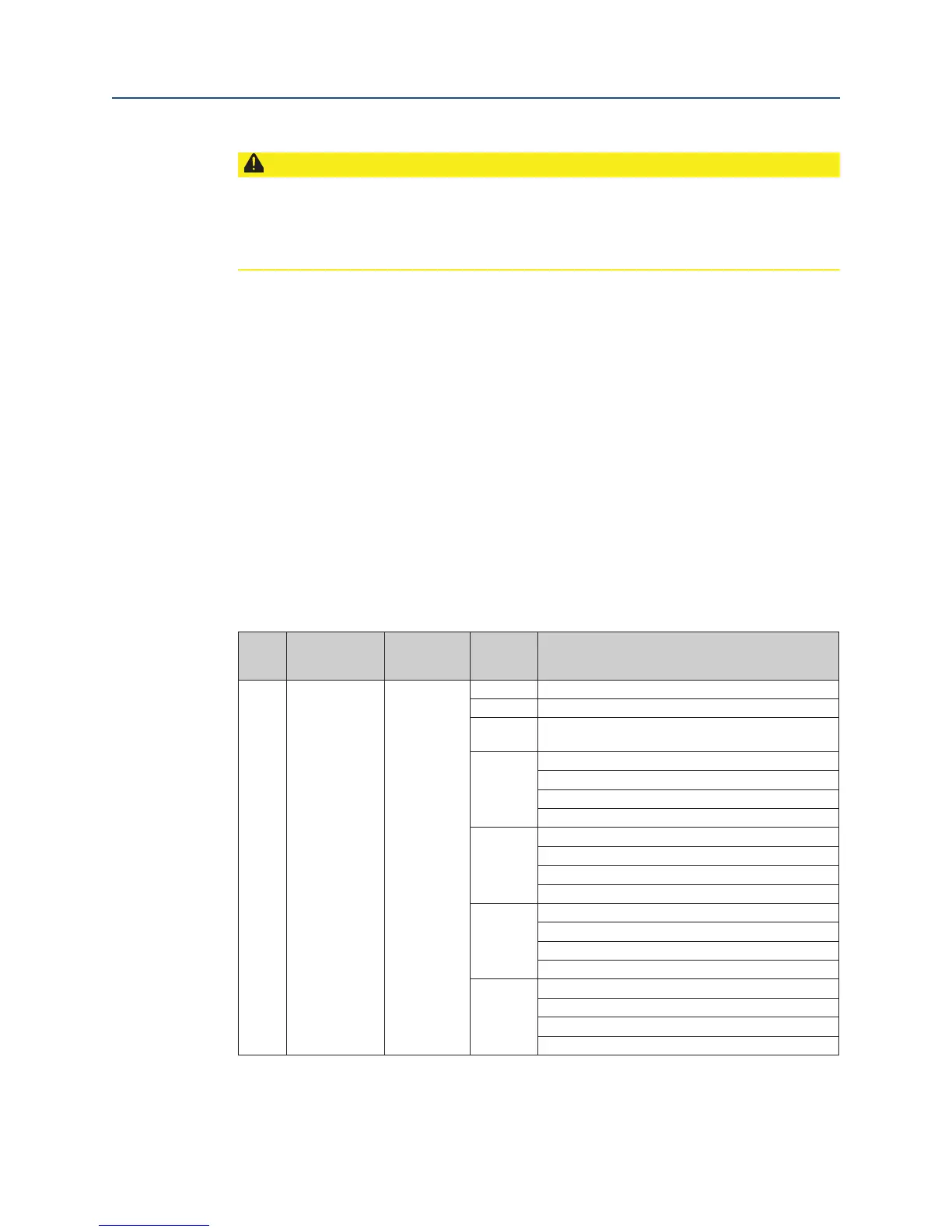
Table 16. Position Output Parameter Group (1)
Menu item
Sub Menu
Item
Poss.
Setting
Notes / Comments
P11.1 PositionOutput Function
0: off mA output disabled
1: Position mA output corresponds to the actual position value
2: Pos.
Valvechar
mA output corresponds to the actual position value
taking into account the valve characteristic.
3: Torque 1
mA output corresponds to the actual torque value
torque = 100% Close: mAoutput = start
torque = 0%: mAoutput = center
torque = 100% Open: mAoutput = end
4: Torqe 2
mAoutput corresponds to the actual torque value
torque = 100% Close: mAoutput = end
torque = 0%: mAoutput = start
torque = 100% Open: mAoutput = end
5: Torque 3
mAoutput corresponds to the actual torque value
torque = 150% Close: mAoutput = start
torque = 0%: mAoutput = center
torque = 150% Open: mAoutput = end
6: Torque 4
mAoutput corresponds to the actual torque value
torque = 150% Close: mAoutput = end
torque = 0%: mAoutput = start
torque = 150% Open: mAoutput = end
 Loading...
Loading...





