96 ADV200 • Quick start up guide
Step 9 – Setting the synchronous motor in “Flux Vect OL” mode
(sensorless) for a typically variable torque-type load with OL control
Menu 04 CONFIG DRIVE, parameter 04.2 Regulation mode, PAR: 552, set = [1]
Flux vector OL .
Test with no load applied to the motor
1. Close the Enable contact (terminals S3 – 7)
2. Close the FR forward src contact (PAR 1042), terminals S3 – 8. The drive
starts magnetising the motor.
3. Using the potentiometer, gradually increase the reference signal until reaching
the maximum speed.
4. Open the FR forward src contact (PAR 1042), terminals S3 – 8, until reaching
the minimum set speed requested by the application.
5. Check that the ramp is linear and, once the set value has been reached, that
the speed remains stable.
Test with rated load applied to the motor
1. Close the Enable contact (terminals S3 – 7)
2. Close the FR forward src contact (PAR 1042), terminals S3 – 8. The drive
starts magnetising the motor.
3. Using the potentiometer, gradually increase the reference signal until reaching
the maximum speed.
4. Open the FR forward src contact (PAR 1042), terminals S3 – 8, until reaching
the minimum set speed requested by the application.
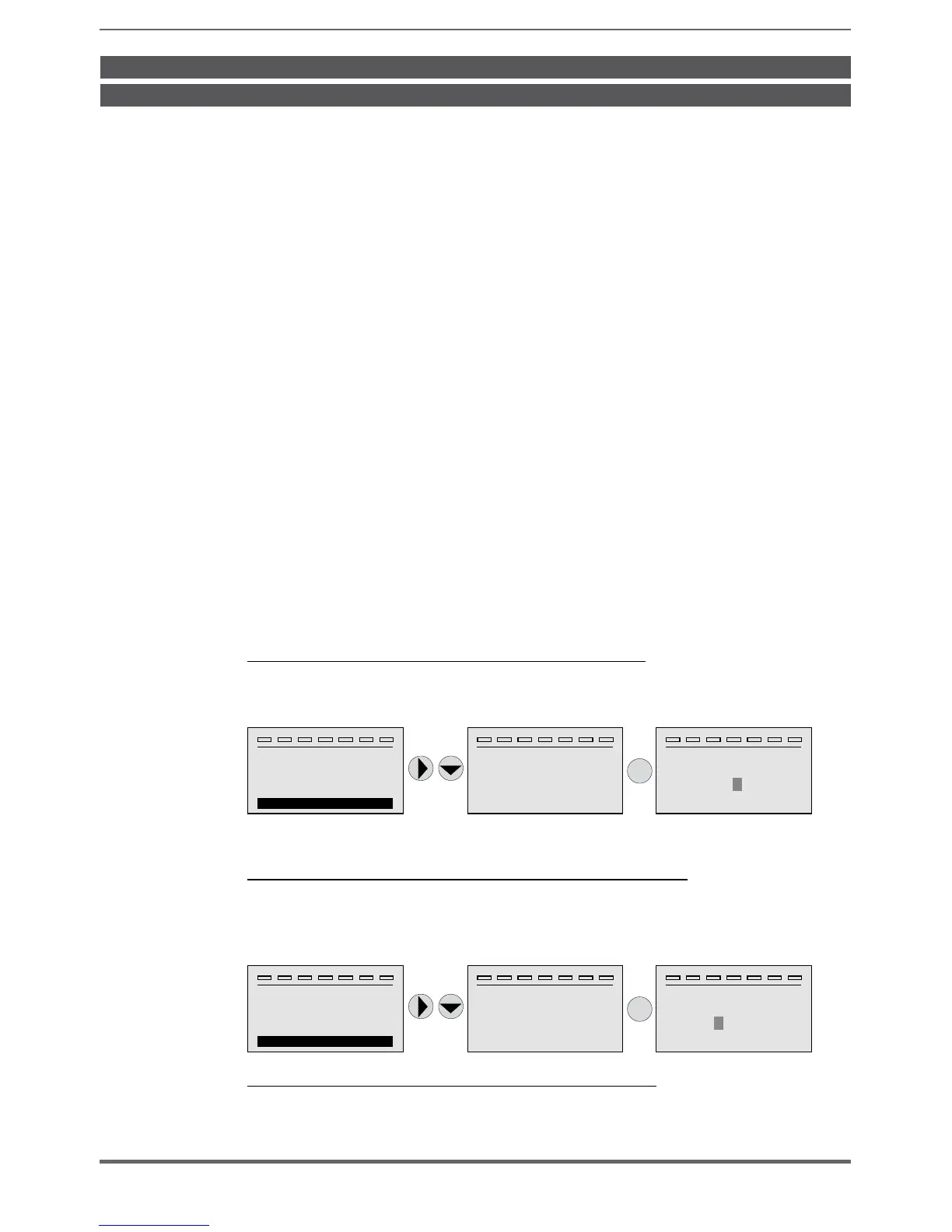
If the motor with the load applied has difculty starting:
increase the value of SLS id current corr (PAR 7014) (this value depends on the
size of the drive) in steps of 10% until the problem is eliminated.
T+ T-ENLOC ILim n:0 AL
18 SPEED REG GAINS
19 REGULATOR PARAM
20 TORQUE CONFIG
21 SENSORLESS
E
T+ T- EN LO C ILim n:0 AL
2 1 . 0 4
PA R: 7 0 1 4
SLS id current corr
7.36
A
Def: 7.36
T+ T- EN LO C ILim n:0 AL
2 1 . 0 4
PA R: 7 0 1 4
SLS id current corr
A
Def: 7.36
0000007.36
x3
If mechanical vibrations occur during steady state operation:
reduce the value of SLS id current corr (PAR 7014) (this value depends on the
size of the drive) in steps of 10% so as to reach a compromise with that stated
above, also changing parameter SLS obs speed gain (PAR 7022) in steps of 0.
T+ T-ENLOC ILim n:0 AL
18 SPEED REG GAINS
19 REGULATOR PARAM
20 TORQUE CONFIG
21 SENSORLESS
E
T+ T- EN LO C ILim n:0 AL
2 1 . 0 8
PA R: 7 0 2 2
SLS obs speed gain
1.000
Def: 1.000
T+ T- EN LO C ILim n:0 AL
2 1 . 0 8
PA R: 7 0 2 2
SLS obs speed gain
Def: 1.000
00001.000
...
If current overloads occur during steady state operation:
with the drive disabled and the Enable contact (terminals S3 – 7) open, change
parameter SLS id sel ctrl (PAR 7020) by selecting control “[1] Advanced”.

 Loading...
Loading...






