ADL300 • Quick installation guide - Specifications and connection 125
A.3 Encoders and encoder expansion cards
A.3.1 Encoders
Encoders provide motor speed and position feedback
The regulation algorithms in the ADL300 drive are capable of controlling asynchronous and permanent magnet
synchronous (brushless) motors. With asynchronous motors the regulation algorithm may or may not use the speed
measurement obtained from the encoder reading. With brushless motors the regulation algorithm needs an encoder
that also allows the absolute motor position to be veried.
The ADL300B drive supports digital incremental and sinusoidal encoders managed via the standard encoder card.
The type of encoder that is connected must be selected via software: PAR 2132 Encoder mode (menu 15 - ENCODER
CONFIG).
The drive ADL300A supports different types of encoders, each managed by a specic expansion card. The card is
automatically recognised at startup
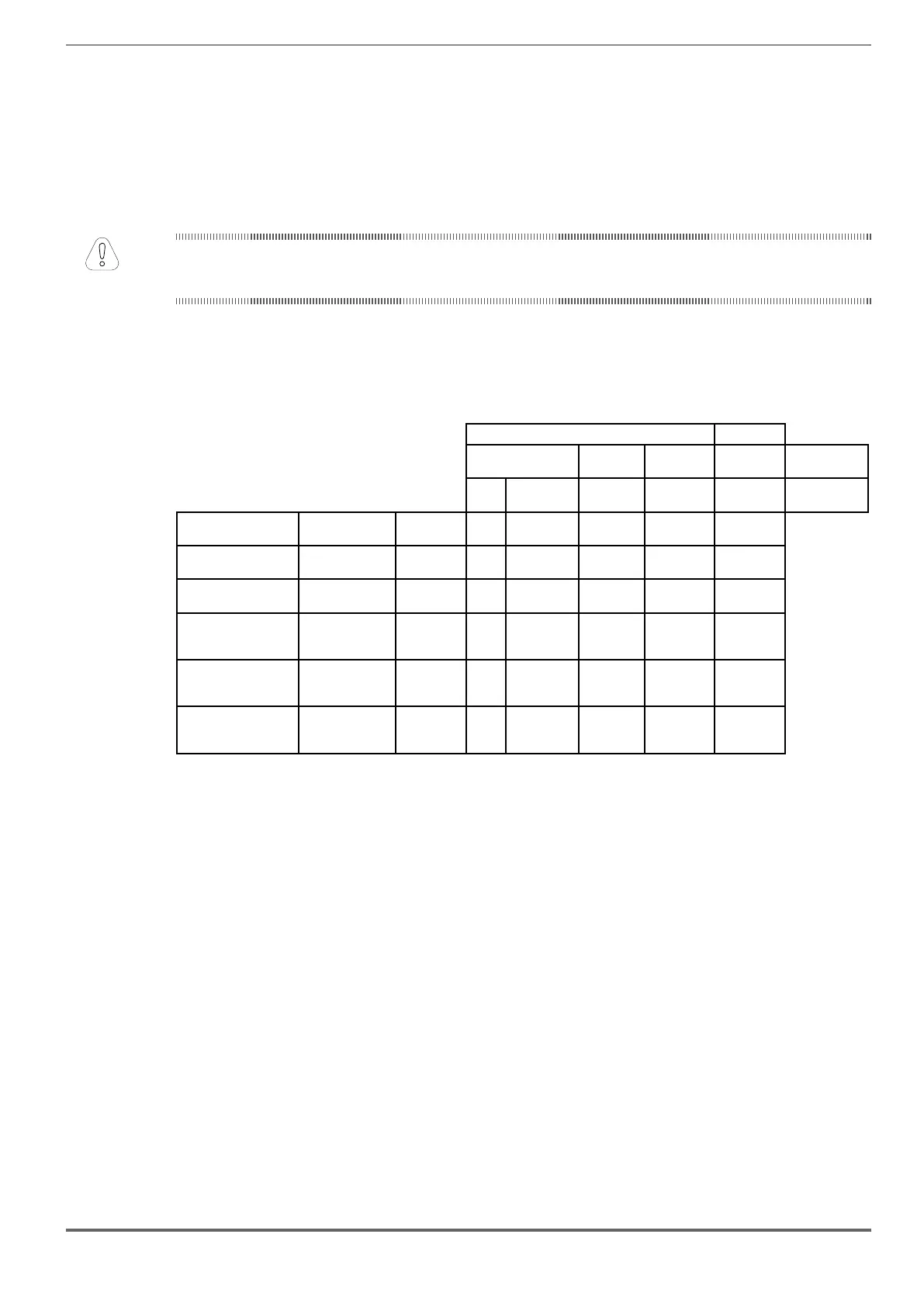
Possible congurations are summarised in the table:
Asynchronous Brushless
SSC
Flux Vector
OL
Flux Vector CL Flux Vector CL
PAR 552 –
Regulation mode
SSC OL SSC CL - -
PAR 2444 – Slip
comp mode
Encoder type
Card code
EXP – xx
PAR 532, Slot2
card type
Incremental Digital DE Enc 1 - Recommended - Recommended Possible
Incremental sinusoidal SE Enc 2 - Possible - Recommended Possible
Incremental sinusoidal +
absolute SinCos
SESC Enc 3 - Possible - Possible Recommended
Incremental sinusoidal +
Absolute Endat/SSI
EN/SSI Enc 4 - Possible - Possible Recommended
Incremental sinusoidal +
Hiperface absolute
HIP Enc 5 - Possible - Possible Recommended
- = encoder not used
Encoders must be tted to the motor shaft using anti-backlash couplings. The best control is achieved with congura-
tions that have incremental sinusoidal channels.
For electrical connections always use good quality cables with shielded twisted pairs, according to the procedures and
specications described in the following paragraphs.
The conguration parameters for each encoder can be found in the ENCODER CONFIG.
In the event of an encoder malfunction the drive generates the Speed fbk back loss alarm and the cause of the mal-
function is shown in parameter 2172 SpdFbkLoss code.
If the encoder is not used by the regulation algorithm the drive still manages the encoder position reading but does not
generate an alarm in case of malfunctioning.

 Loading...
Loading...






