D2 Drive User Guide v1.8 8. Protection Function
HIWIN Mikrosystem Corp. 239
Table 8-4
Delay time of starting brake
(“delMaxEnToBrk”)
The maximum time from receiving the disable command to
starting the brake.
Emergency stop deceleration
(“Dec. kill”)
The deceleration of motor brake during emergency stop.
Refer to Section 8.1.
Brake start speed (“vel_stop”)
The speed for starting the brake after receiving the disable
command.
Brake action time (“deBrkToDis”)
The delay time from starting the brake to shutting down the
post-stage current.
Delay time for the dynamic brake
relay (“delRelsBrk”)
The delay time from closing the brake to completing the
switchover of dynamic brake relay. (Frame A - C models do
not support this function. Hence, this field is anti-gray and
cannot be set.)
(2) Brake configuration page for frame D model
The frame D model has the built-in dynamic brake resistor. Its characteristics are
described as follows.
(a) It is only applicable to the transient braking effect, and cannot achieve the bite ability
of general mechanical brake.
(b) The braking performance is poor in comparison to the emergency deceleration. Its
main function is to compensate some error cases that the braking function does not
apply the emergency deceleration.
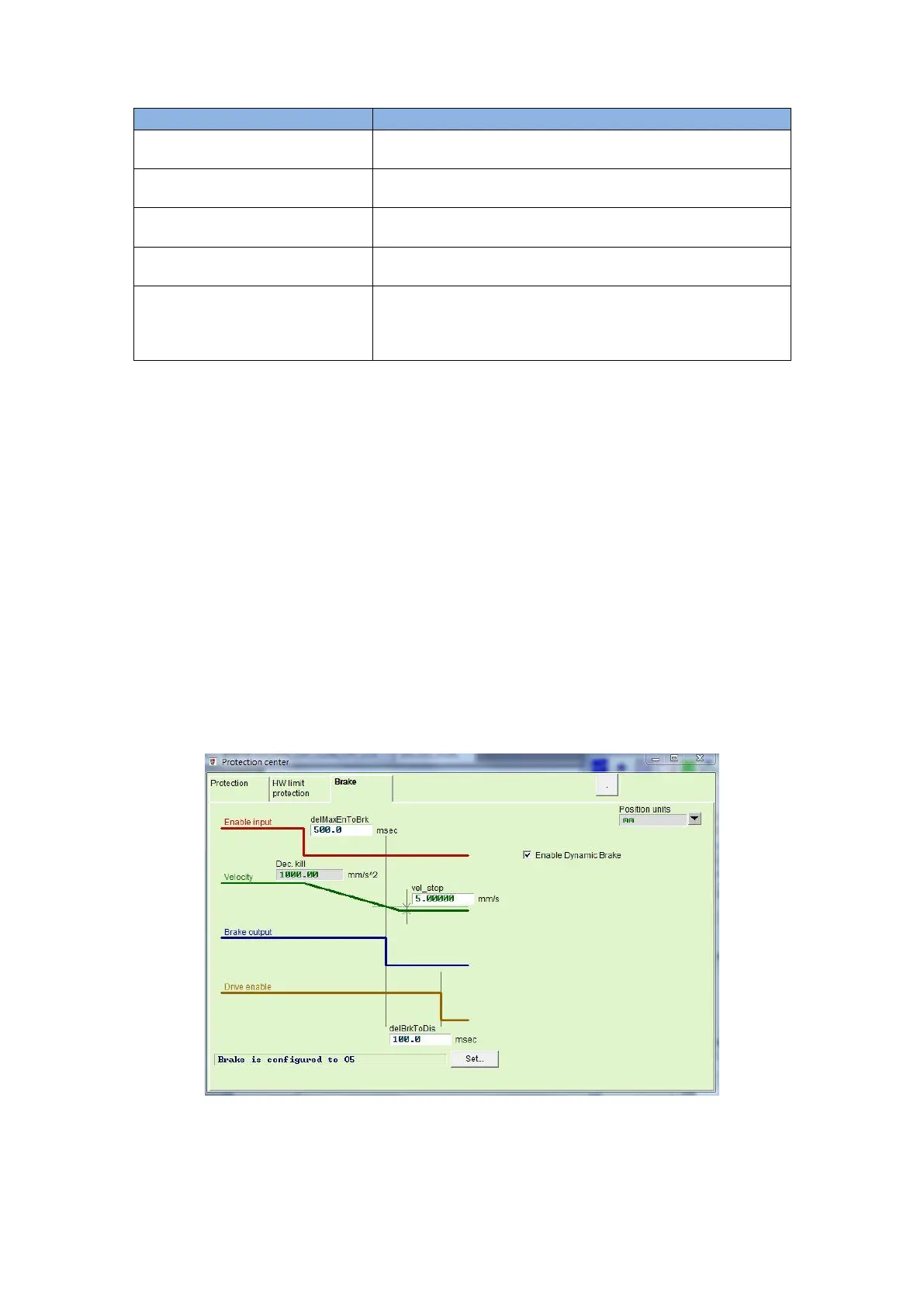
The brake configuration page for the frame D model is shown in Fig. 8-7, and brake
parameters are the same as those given in Table 8-4. To enable the dynamic brake
function, simply check the option of “Enable Dynamic Brake”. If the option of “Enable
Dynamic Brake” is unchecked, this function is disabled. Although the frame D model has
the built-in dynamic brake resistor, in most cases, it will first use the mechanical brake
process to decelerate. Only when the error of E01, E02, E03, E04, E07, E10, or E12
occurs (see Section 9.3 for error codes), the dynamic brake is activated first, and then the
mechanical brake process is activated. Refer to Fig. 8-8 to Fig. 8-10 for the dynamic
brake timing.
Fig. 8-7