Chapter 6 Application Debugging
44 MONT20 User Manual V1.6
6.2.2 Door Width Self-learning
The door width of door motor is the basis for controlling the distance of the door motor, adjusting the
OD/CD running curve and judging complete OD/CD. The accurate acquisition of the door width is the
prerequisite for the normal realization of the distance control.
Note:
1. During the door width self-learning process, the direction of the door action will automatically change, so
please ensure personal safety before operating, otherwise it may cause personal injury.
2. Before door width self-learning, please make sure that there are no obstacles during the operation of the
door. If there are obstacles, the door width cannot be measured correctly.
Setting Door Width Self-learning
1. Set F00.02 = 1 (distance control), F00.03 = 0 (keypad control).
2. Choose self-learning method.
• Without a hall door: Set F02.05 = 1 (door width self-learning is valid).
• Press (RUN key) or (JOG key) to start self-learning. After completion, check F02.05 = 0.
• The door width data is recorded in F02. 06 and F02.07.
• With a hall door: Set F02.05 = 2 (door width self-learning is valid), the door vane distance can be learned.
• Press (RUN key) or (JOG key) to start self-learning. After completion, check F02.05 = 0,
F10.04 ≠ 0.
• The door width data is recorded in F02.06 and F02.07, and the door vane data is recorded in F10.04.
When an abnormality occurs during the door width self-learning process, press (STOP key) to stop.
Then press (RUN key (or JOG key) restart the self-learning.
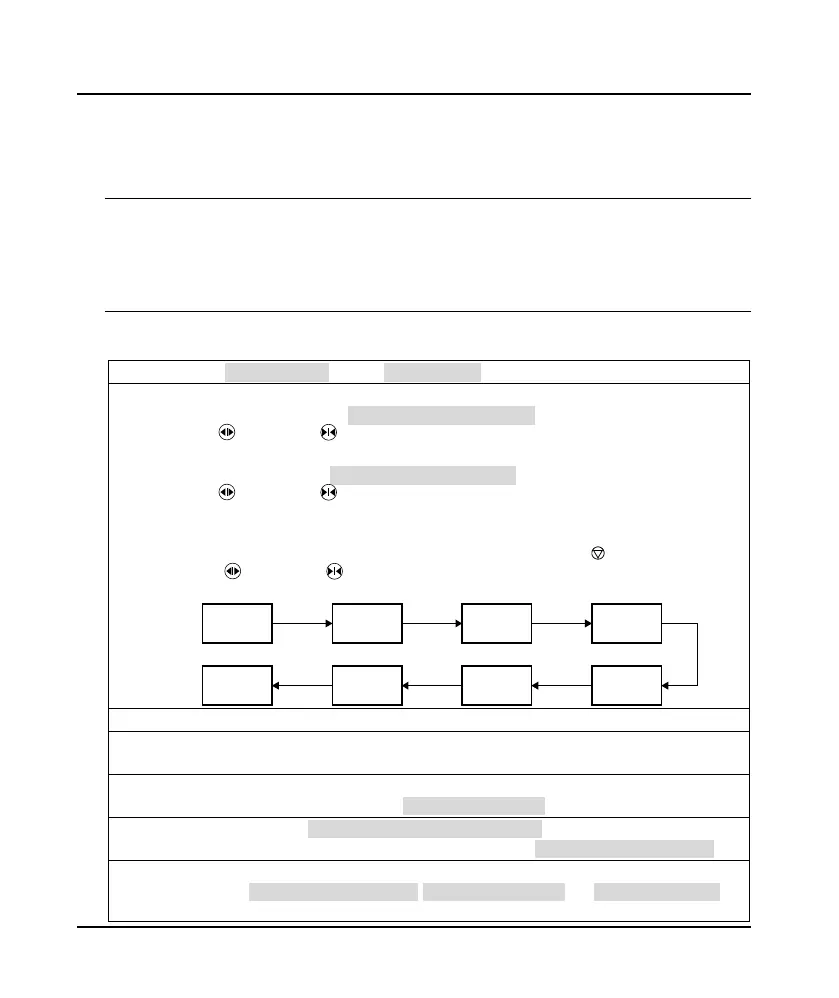
The normal operation of self-learning is as the figue below.
Exception handling:
1. Giving door width self-learning command, the first running direction is CD.
Countermeasure: Stop MONT20 and exchange any two phases of U, V, W.
2. Check the CD pulse signal in self-learning. The CD pulse number increases if the OD pulse number decreases.
Countermeasure: Modify the setting value of F02.01 (encoder direction).
3. During self-learning, alarms E0026 fault (door width self-learning failed).
Countermeasure: Check encoder signal. For heavy load type, increase F05.14 (OD/CD switching torque).
4. When the Asyn. motor is self-learning, the door motor jitters and stops.
Possible reason: F02.00 (encoder pulse number), F02.01 (encoder direction), and F01.05 (deduction rate)
setting error.
Complete
OD
Complete
OD
OD
OD
Pluse
increase
Pluse
decrease
Complete
CD
Complete
CD
CD
CD
 Loading...
Loading...