Chapter 5 Function Introduction
MONT20 User Manual V1.6 35
5.2.8 F07: Vector Control Parameter
Ref. Code Function Description Setting Range [Default]
F07.01 High speed ASR KI 0 - 1000 [100]
F07.03 Low speed ASR KI 0 - 1000 [100]
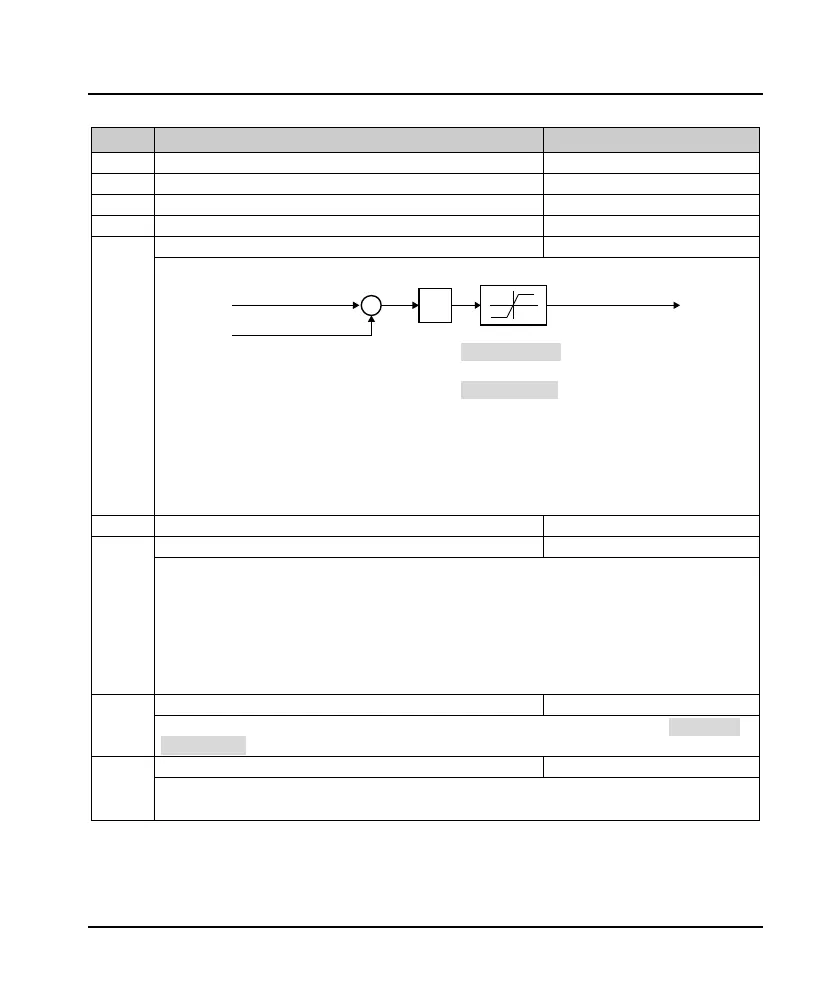
F07.00 - F07.04 sets PID parameter of ASR. The structure of ASR is shown as below:
• The system response can be expedited by increasing F07.00, F07.02 (KP), but oscillation may occur if KP is
too high.
• The system response can be expedited by increasing F07.01, F07.03 (KI), but oscillation and high overshoot
happen easily if the KI is too high.
• If KI = 0, the speed loop works merely as a propotional regulator.
• Generally, adjust KP first to increase KP as much as possible under the premise that the system does not
oscillate, and then adjust KI to make the system have fast response characteristics and little overshoot.
• To improve the dynamic response characteristics in low frequency running, it is necessary to increase KP
and reduce KI.
F07.05 Current loop KP 10 - 9999 [100]
F07.05 and F07.06 define the PI regulator parameter of current loop.
• Increasing the current loop KP or KI can speed up the system's dynamic response to the output torque;
Reducing KP or KI can enhance the stability of the system.
• If the current loop KP or KI is too large, the system is prone to oscillation; If KP or KI is too small, the system
torque output capacity will be affected.
Note: For most occations, there is no need to adjust the PI parameters of the current loop. It is recommended that
users change this group of parameters carefully.
Define the torque current output by MONT20. The setted value is relative to the percentage of motor rated
current (F01.02).
Speed filter time constant
It is used to filter the output of ASR regulator.
• F07.08 = 0, the speed-loop filter is disabled.
Frequency feedback
Frequency command
Error
PID
Torque limit
Torque current setting
+
-
 Loading...
Loading...